康耐视机器视觉系统完整最新版:调试助手与康耐视智能相机Insight以太网通讯
一、通讯连接
1.查看需要连接的相机IP地址
在脱机模式下,点击“传感器”下的“网络设置”可以查看相机的ip地址和通讯端口号。

2.建立连接
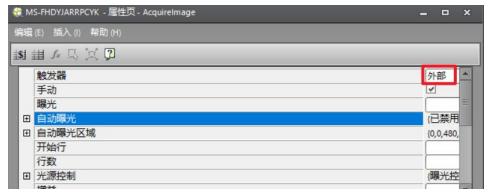
①首先需要修改相机的触发模式,双击单元格A0(Image),选择触发器,”外部“、手动、网络都可以;
②打开调试助手,建立客户端,ip和端口分别填写相机的ip和端口;

③调试助手点击”连接“,此时会收到相机的反馈信息,提示需要输入登录信息。

④输入”admin 回车“点击发送,此时会提示输入密码,密码默认为空,直接输入”回车“点击发送。此时如果密码正确会提示登录成功。如果密码错误,则会重新提示输入用户名。

3.控制相机状态
①控制相机在线/离线。(相机需要先在线。)
联机:SO0 回车,相机进入通讯联机状态。
离线:SO1 回车,相机进入通讯脱机状态。

查询相机联机状态:
发送GO 回车,相机将反馈当前的状态, 0代表脱机, 1代表
联机;

相机相关事件触发:
发送SE 事件号 回车,相机将触发指定事件;(触发事件即刻反馈执行情况)
发送SW 事件号 回车,相机将触发指定事件并等待事件完成;
(等待事件之后的一系列检测程序完成再反馈执行情况)
默认SW8为相机的拍照事件

4.控制JOB
加载作业:
在脱机状态下,通讯助手发送LF 文件名 .job 回车


删除job:
发送DF 文件名 .job 回车

设置单元格数值: SI/SF/SS 单元格坐标 数值 回车

设置Region控件:
SR 控件单元格坐标 区域起点X 空格 区域起点Y 空格 区域高度 空格 区域宽度 空格 区域角度 空格 区域曲线角度 空格
添加函数: EV 空格 单元格坐标 空格 启用 空格 函数

免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






