闭环放大倍数和增益的换算公式(三环带宽的关系)
伺服应用于要求精度高、定位快的场合,在简单的调整刚性和惯量比无法满足现场要求时,该如何对伺服进行增益调整? 从伺服控制本质的三环控制、三环带宽的关系、增益参数调试步骤、各增益参数原理以及对伺服运行的影响、常用滤波器等方面介绍伺服增益调整原理与应用经验。
伺服驱动器由电流控制环,速度控制环和位置控制环三个环路组成,控制框图如下:

内层的带宽一定大于外层的带宽,否则整个控制系统为不稳定系统,会造成系统震荡。所以,以上三个环路的带宽关系为:
电流环带宽>速度环带宽>位置环带宽
位置和速度带宽的选择是否合适是由机械的刚性和现场应用场合决定的,一般的应用场合,调整惯量比和刚性即可达到现场的响应和定位要求。
如果惯量比和刚性调整后,依然无法达到现场的应用要求,需要对位置环和速度环的参数一一进行微调时,但需要注意的是,如果改变其中一个参数,则其他参数也需要重新调整,请不要对某一个参数做较大额的更改。一般可遵循以下步骤:
伺服驱动器主要的性能参数调整有三个:1.速度环比例增益;2.速度环积分时间常数;3.位置环比例增益。
速度环比例增益、积分时间常数仅对电机在运行时(有速度)起作用。速度环比例增益的大小,影响电机速度的响应快慢,速度环积分时间常数的大小,影响电机稳态速度误差的大小及速度环系统的稳定性。当伺服电机带上实际负荷时,由于实际负载转矩和负载惯量与缺省参数值设置时并不相符,速度环的带宽会变窄,如果此时的速度环带宽满足需求,没有发生电机速度爬行或振荡等现象,可以不调整速度环的比例增益及积分时间常数。如果实际负荷使电机工作不稳定,发生爬行或振荡现象,或者现有的速度环带宽不理想,则需要对速度环的比例增益、积分时间常数进行调整。
在调试开发伺服经常调整这俩个驱动参数,通常都是在轴振动及加工表面不平滑来调使之达到一定的响应速度从而改变加工效果。
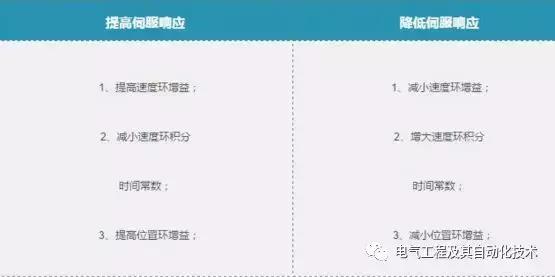
位置环比例增益仅在驱动器工作在位置方式时有效。当伺服电机停止运行时,增加位置环比例增益,能提高伺服电机的锁定刚度。当伺服电机在位置环下运行时,增大与减小位置环比例增益时,位置滞后量将随之变化。
位置环增益的调整如是插补轴需同步,起滞后量也就是跟随误差,直接决定与插补的状态。我通常是调整该参数是在轴响应性过强来增大位置环增益从而实现轴运动换向时减少对机械的冲击。
应该知道这俩个参数与加速度是不同的,轴加速度是从高速到低速或反之的过程时间。而速度环增益改变的是电机的刚性大小,位置环增益改变的是轴的跟随特性。
位置控制的增益调整步骤如下:
1、 设定合适的转动惯量比;
2、 设定速度环积分时间常数为较大值;
3、 加大速度环增益,如果机械振动,稍许调小;
4、 减小速度环积分时间常数,如果机械振动,稍许调大;
5、 增大位置环增益,如果机械振动,稍许调小;
6、 如果因为机械系统发生共振而无法加大增益,进而无法得到应有的伺服应用要求,可以对转矩低通滤波器或陷波器调整抑制机械系统共振;然后重新操作以上步骤以提高伺服性。建议首先使用转矩低通滤波器,若转矩低通滤波器效果不好再考虑陷波器;
7、 若需要更短的定位时间和更小的位置跟踪误差,可适当增加速度前馈,即速度前馈增益,但不宜超过80%;
速度控制的增益调整步骤如下:
1、设定合适的转动惯量比;
2、设定速度环积分时间常数为较大值;
3、加大速度环增益,如果机械振动,稍许调小;
4、减小速度环积分时间常数,如果机械振动,稍许调大;
5、如果因为机械系统发生共振而无法加大增益,进而无法得到应有的伺服应用要求,可以对转矩低通滤波器或陷波器调整抑制机械系统共振;然后重新操作以上步骤以提高伺服性。建议首先使用转矩低通滤波器,若转矩低通滤波器效果不好再考虑陷波器;
速度环增益:
速度环增益直接决定了速度环的响应带宽。在机械系统不产生共振或噪音的情况下,增大速度环增益,速度响应会越快,对速度的跟随性越好。但过大的速度环增益会引起机械共振。
速度环带宽(Hz) = (1 G)/(1 JL/JM)*速度环增益(Hz)
其中:G为转动惯量比,JL为折算到电机轴的负载转动惯量,JM为电机转子转动惯量。当设定值G=JL/JM时,速度环增益即为速度环带宽。
速度环积分时间常数:
速度环积分时间常数可以有效的消除速度稳态误差,快速反应细微的速度变化。在机械系统不产生共振或噪音的情况下,减小速度环积分时间常数,可以增加系统刚性,降低稳态误差。如果负载惯量比很大或机械系统存在共振因素,必须加大速度环积分时间常数,减小积分的作用,否则机械系统容易发生共振。如果惯量比参数G设置为JL/JM的情况下,速度环积分时间常数为:
速度环积分时间常数(ms) = 4000/(2*pi*速度环增益(Hz))其中:pi为圆周率。
位置环增益:
位置环增益直接决定了位置环的反应速度。在机械系统不产生共振或噪音的情况下,增加位置环增益,减小位置跟踪误差,缩短定位时间。但过大的位置环增益也会造成机械系统抖动或定位超调。位置环带宽不可高于速度环带宽,如下:
位置环带宽(Hz) <= 速度环带宽(Hz)/4
如果惯量比参数G设置为JL/JM,位置环增益可以计算:
位置环增益(1/s) <= 2*pi*速度环增益(Hz)/4
转矩低通滤波器:
低通滤波器对高频有很好的衰减,能较好的抑制高频震荡和噪声,但对中低频共振无抑制作用。例如丝杠连接负载时,增加刚性可以提高系统响应,当提高到一定程度时,有时会发生高频共振,电流发生震荡,使用转矩低通滤波器会有较好的效果。
设置值越小,系统的响应性越能很好的控制,但受机械条件限制;设置值越大,越能抑制高频共振,但太大设置值会造成响应带宽和相位裕度减小,造成系统震荡。

陷波器:
伺服驱动器中有两个陷波器,可以同时使用,能抑制两种不同的频率共振。系统的共振频率可以大概通过观看电流波形计算得到,共振频率知道的情况下,陷波器可以直接将共振现象消除;共振频率不确定的情况下,可以从高到低逐步降低陷波器频率设置值,直至电流振荡最小的频率设置值即为最优值。

如果共振频率是随着时间或其他因素偏移的,且偏移范围较大,则陷波器不适用。

陷波器不仅包括频率这个参数,还包括陷波器深度和品质因数。陷波器深度越深,机械共振抑制效果越好,但会造成相位延迟大,有时反而会加大系统的振动;陷波器宽度越宽,品质因数越小,机械共振抑制效果越好,但也会造成相位变化区域大,有时也反而会加大系统的振动。
实际应用中, [刚性] 这个词,我们经常用到,那么对于设备刚性调节根据经验,可以这样调节到一个合适的值:
在设备允许的情况下,尽可能增大刚性,当设备出现抖动时,减小刚性。
私信“干货”二字,即可领取18G伺服与机器人专属资料!,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






