伺服电机电子齿轮比演示实例 伺服驱动电子齿轮比计算实例
一、计算电子齿轮比几个相关概念
1、脉冲当量
PLC发出一个脉冲时,丝杠移动的直线距离或旋转轴转动的度数,也是PLC能控制的最小单位。
脉冲当量值越小,表示精度越高;脉冲当量值越大,表示最大进给速度越大。
因此,在进给速度满足要求的情况下,建议设定较小的脉冲当量。
2、最大进给速度=脉冲当量×60×频率
例如:朗达4S的硬件频率为1MHz,假设脉冲当量为0.001mm/p,最大进给速度=0.001mm/p×60×10kHz= =60m/min
3、机械减速比(m/n)
减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的比值,在数控机床上为电机轴转速与丝杠转速的比值。即:
机械减速比=减速器输入转速:减速器输出转速=从动齿轮齿数:主动齿轮齿数=电机轴转数:丝杠转数
4、螺距(d)
丝杠上相邻两个螺纹对应点之间的轴距离。
5、电子齿轮比(CMX/CDV)
伺服驱动器对接收到上位机的脉冲频率进行放大或缩小, CMX/CDV >1为放大,CMX/CDV <1为缩小。
如果上位机输入频率为100Hz,电子齿轮比分子设为1,分母设为2,那么伺服驱动器实际运行速度按照50Hz的脉冲进行。
如果上位机输入频率100Hz,电子齿轮比分子设为2,分母设为1,那么伺服驱动器实际运行速度按照200Hz的脉冲进行。
6、编码器分辨率(F)
编码器旋转一圈所产生的脉冲个数。
二、电子齿轮比计算原理

电子齿轮的计算通常以电机旋转一周进行计算,要求:
PLC发出的脉冲的个数×电子齿轮比=电机编码器反馈回来的脉冲数
二、例题
例1:丝杆的螺距是5mm,脉冲当量是0.001mm/p,编码器分辨率是17bit,伺服电机直接与丝杆相连,计算电子齿轮比。


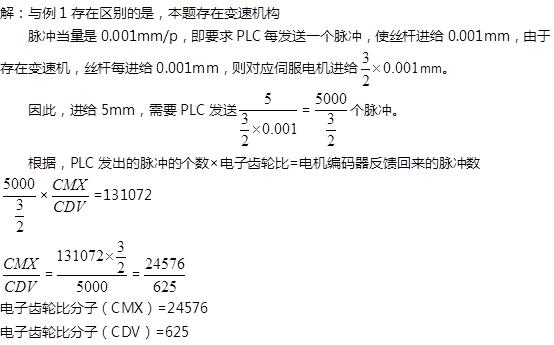
例2:伺服电机通过变速机构和丝杆相连,丝杆的螺距是5mm,脉冲当量是0.001mm/p,编码器分辨率是17bit,计算电子齿轮比。

以上例1和例2均为直线轴运动情况,以下为旋转轴运动情况,
例3:已知条件,
伺服电机额定转速为:2000r/min,
编码器分辨率为:4096p/r,
PLC输出最高脉冲频率为:100kHz,
伺服电机输出轴连接减速机构,减速比为4:1(即输入转速:输出转速=4:1),
转盘脉冲当量为:0.1°/p,即PLC每发送一个脉冲,转动0.1°。
机械结构如下图所示,计算电子齿轮比。


免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






