知本术明相位(相位偏折术原理概述)
作者:曹博
来源:微信公众号|3D视觉工坊(系投稿)
相位偏折术是一个比较冷门的方向,主要用于测量镜面物体。一直以来,干涉法都是测量镜面最佳方法,精度可以达到波长的几百分之一,但是有一些局限性:
- 测量自由面型的镜面物体时,干涉法所需要的光学补偿原件制作复杂且昂贵;
- 回程误差,干涉法很难快速标定;
- 测量环境苛刻,不适合干涉法测量,因为轻微抖动、温度变化,会给测量记过带来很大误差;
解决:PMD,相位偏折术,对环境不敏感,没有回程误差,因而标定相对简单,可以测量自由曲面。其实偏折术系统跟结构光系统是非常相似的,回顾下它的重建流程:
- 标定相机,以及屏幕、相机位置关系
- 使用屏幕投影条纹(结构光使用投影仪)
- 解码获取表面梯度(结构光直接获取高度)
- 梯度积分获取高度信息
额外说明的是,偏折术系统中常说的“精度”达到几纳米,不是传统意义上的“精度”,这是因为偏折术通常用来测量纯镜面反射的物体表面,比如说天文望远镜的镜面,它的模型假设中也假设参考平面跟实测待镜面在同一高度,所以精度甚至可以达到几纳米。
01 原理单相机PMD系统如图1所示,系统由LCD显示屏、CCD相机和计算机组成:
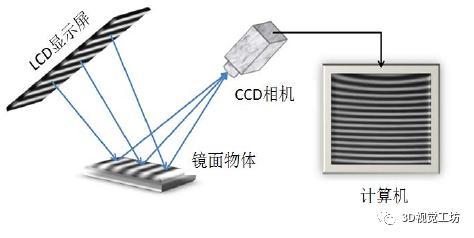
图1 PMD系统示意图 [1]
简单原理:
- 显示屏显示计算机生成的结构光条纹;
- 相机通过待测镜面表面拍摄显示屏上条纹的镜像;
- 如果镜面表面不平整的话,则拍摄到的条纹会产生相应的变形;
更复杂原理,如图2所示(由于光路可逆,我们对光线反向描述):

图2 PMD系统原理图 [1]


在这个式子的推导中,有一点需要额外注意这个近似条件,实际上它是现有单相机PMD系统中误差的主要来源:
近似条件:我们认为,待测物体的高度要远小于,在点处待测镜面和参考面位置的高度点是完全一致的,忽略了这部分误差,认为相位仅仅与镜面表面梯度相关。
之后的重建步骤:
- 相位的获取原理跟结构光相类似
- 根据相位获取梯度
- 在获取了梯度之后,对 x,y方向分别沿路径进行积分
最终即可获取高度信息。
说明:这篇文章目的仅仅是对相位偏折术的核心原理做个概略性的介绍,完整的推导并未介绍,更多的细节请查看相关论文。
02 特性相比较来说,PMD有以下优势:

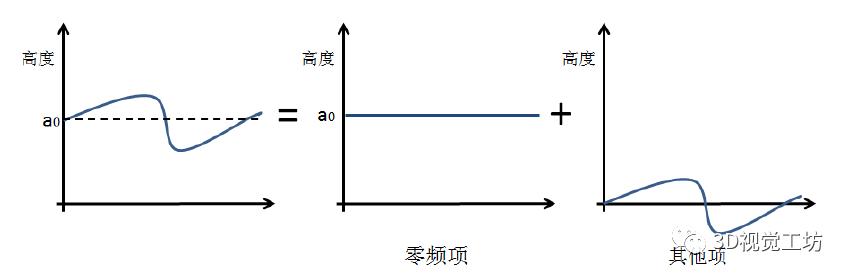
图3 振动对梯度测量的影响 [1]
因为我们测量的是平面,即零频项信息,其是不包含梯度的,该项的变化不会引起反射光线角度的变化。
- 对系统随机误差不敏感,因为积分的累积效应,使得随机噪声在积分过程中被很大程度抑制。
- 获得更准确的曲率信息:
- 计算曲率是检测面形缺陷的重要手段,梯度测量法仅仅需要对获得的梯度求一阶导数就可以获得曲率;
- 而直接的高度测量方法则要二阶导数才能获得曲率,计算二阶导数会丢失更多的信息,计算得到的曲率较为不准确;
但相比较来说,梯度测量方法也有以下缺陷:
- 只能测量连续的镜平面;
- 积分过程引入误差;
一句话概括,PMD相比较FFP精度更高,但是测量场景受限,只能测量连续的镜平面!
03 参考文献[1] 基于光学三维成像的镜面物体表面质量检测方法研究 [博],吴雨祥
备注:作者也是我们「3D视觉从入门到精通」特邀嘉宾:一个超干货的3D视觉学习社区
本文仅做学术分享,如有侵权,请联系删文。
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






