机器人腹腔镜手术手的姿势(机器人无需人类帮助)
机器人无需人类帮助,自主进行第一次腹腔镜手术
用于肠道吻合术的自主机器人腹腔镜手术
【导读】:
自主机器人手术有可能提供与个体外科医生的技能和经验无关的疗效、安全性和一致性。自主吻合术是一项具有挑战性的软组织手术任务,因为它需要复杂的成像、组织跟踪和手术计划技术,以及通常在非结构化和可变形环境中通过高度适应性控制策略的精确执行。在腹腔镜环境中,此类手术更具挑战性,因为在运动和视力限制下需要高可操作性和可重复性。约翰霍普金斯大学研究人员描述了一种增强的腹腔镜软组织手术自主策略,并展示了机器人腹腔镜小肠吻合术在模型和体内肠道组织中的吻合。这种增强的自主策略允许操作员在自主生成的手术计划中进行选择,机器人独立执行各种任务。
机器人在没有人类指导的情况下对猪的软组织进行了腹腔镜手术——这是机器人技术向人类全自动手术迈出的重要一步。由约翰霍普金斯大学研究人员团队设计的智能组织自主机器人 (STAR) 在今天的《科学机器人》中有所描述。

智能组织自主机器人可以在没有人类帮助的情况下对猪的软组织进行腹腔镜手术。
“我们的研究结果表明,我们可以自动化手术中最复杂和微妙的任务之一:重新连接肠道的两端。STAR 在四只动物身上进行了手术,它产生的结果明显优于人类进行相同手术,”约翰霍普金斯大学怀廷工程学院机械工程助理教授、作者 Axel Krieger 说。
该机器人擅长肠道吻合术,这是一个需要高水平重复运动和精确度的手术。连接肠道的两端可以说是胃肠手术中最具挑战性的一步,需要外科医生以高精度和一致性进行缝合。即使是最轻微的手部颤抖或错位的缝线也可能导致泄漏,这可能会给患者带来灾难性的并发症。
Krieger 与华盛顿特区国家儿童医院的合作者以及约翰霍普金斯大学电气和计算机工程教授金康合作,帮助创建了机器人,这是一种专门用于缝合软组织的视觉引导系统。他们目前的迭代推进了 2016 年的模型,该模型准确地修复了猪的肠道,但需要大切口才能进入肠道并需要更多的人类指导。
该团队为 STAR 配备了增强自主性和提高手术精度的新功能,包括专门的缝合工具和最先进的成像系统,可提供更准确的手术区域可视化。
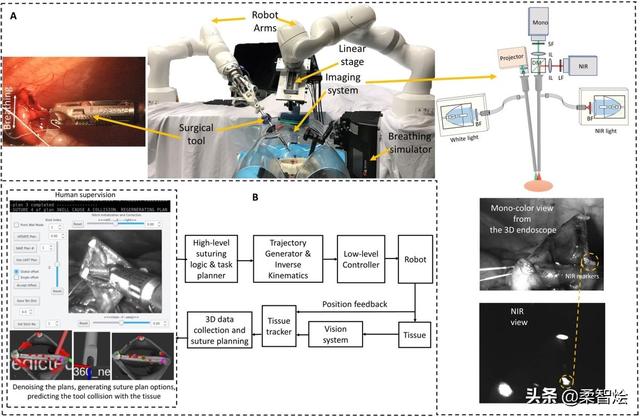
增强自主腹腔镜软组织手术。机器人在没有人类帮助的情况下对猪的软组织进行了腹腔镜手术。( A ) STAR 系统的组成部分,包括医疗机械臂、驱动手术工具以及双通道 NIR 和 3D 结构光内窥镜成像系统。( B ) STAR 增强型自主控制策略的控制架构。
Krieger 说,软组织手术对机器人来说尤其困难,因为它的不可预测性,迫使它们能够快速适应以应对意想不到的障碍。STAR 有一个新颖的控制系统,可以像人类外科医生一样实时调整手术计划。 “STAR 的特别之处在于,它是第一个在软组织中规划、调整和执行手术计划且人工干预最少的机器人系统。”
金康和他的学生开发的基于结构光的三维内窥镜和基于机器学习的跟踪算法指导 STAR。“我们相信先进的 3D 机器视觉系统对于使智能手术机器人更智能、更安全至关重要,”金康说。

(B)通过达芬奇SI(RAS)进行机器人辅助远程操作,该系统包括主控制台,两个用于控制手术工具的机械臂,以及一个立体内窥镜。(C) 增强的通过STAR进行自主腹腔镜吻合。
Krieger 称,随着医学领域朝着更多的腹腔镜手术方式发展,拥有一个为此类手术设计的自动化机器人系统来提供帮助将非常重要。 “机器人吻合术是确保每位患者都能以更高的准确性和精确度执行需要高精度和可重复性的手术任务的一种方法,而与外科医生的技能无关。”
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






