提出控制论的科学家(21世纪的控制论英国的控制论)
本次演讲发表于“21世纪的控制论”系列讲座暨论坛,2022年10月28日,活动由广东时代美术馆媒介实验室与器道哲学与技术研究网络主办,汉雅精舍联合主办,许煜担任学术主持,吴建儒策划。讲座主页:https://medialab.timesmuseum.org/en/lectures
控制论是1940年代开发的一门科学。1948年,诺伯特·维纳(Norbert Wiener)将其定义为通信和控制科学,它综合了信息、数字计算和反馈等知识门类。此后,这些领域在不同的时间和地点以非常不同的方式发展。在本次演讲中,我将探讨控制论在英国的主要发展,因此“英国的控制论”是我此次演讲的主题。
我将以独特的世界观或本体论为出发点,因为它们刻画了英国控制论的特征并涉及一些和权力与控制相关的问题。然后我会谈谈英国控制论早期,专注于大脑以及机器人和精神病学的研究,我还将尝试区分控制论和主流人工智能之间的区别。之后,我们可以进一步谈谈控制论扩展到社会科学和艺术等领域的问题。我的大部分例子都是基于史实的,但在最后一部分,我将讨论一些有关新控制论的研究,它是关于人与环境关系的研究,涉及到了人类世的问题。最后,我会将英国控制论的故事与许煜的提出的概念“宇宙技术”联系起来。
本体论
了解英国控制论特别之处最简单的方法就是谈论它的本体论,我指的是它对世界的总体看法。这取决于可知性和不可知性的问题。物理学等传统科学理所当然地认为世界是可知的,我们迟早会发现它是由什么构成的——夸克、黑洞、DNA。这就是现代科学和西方常识的本体论或世界观,我们可以把它看成一种关于可知性的本体论。这是一种普遍的观点。而控制论的发展则与此相悖。1956年,斯塔福德·比尔(Stafford Beer)将控制论定义为极其复杂系统的科学,这意味着要么系统过于复杂,我们永远无法完全理解它们,要么系统十分活跃且总是在不断变化,因此我们永远无法确定它们。关键在于,与传统科学不同,控制论的目的不是产生关于世界的实证知识。相反,我们可以说,它是关于如何与一个不可知和不可控的宇宙相处。更通俗地说,它是一种自适应系统——这类系统能够以某种方式与不可预测的事物达成妥协。
从这个角度来看,控制论几乎是神奇的——我们如何在一个不可知的世界中运作?听起来这是不可能的。但控制论者通过一系列出人意料且多样化的项目将这一愿景付诸实践。这些项目的多样性也是我想强调的内容之一。在我们开始举例之前,我想先提出两个重要的观点。
首先,在强调极其复杂的系统时,控制论突出“作为”的概念——即人们的行动——而不是知识,它关乎表现出了什么而不是了解了什么。因此,控制论项目的一个关键特征就是我所说的“运作实验”(注:讲者认为科学社会学[SSK]不应只关注表征,更应把科学看作是一种实践运作过程)——试图找出世界如何对事物反应,然后据此作出反应——一种被我称为“能动性之舞”(人与物的能动性之间的相互作用)的循环和螺旋式的反复。这种循环运动有多种不同的进行方式,我们将在接下来的示例中看到。
其次,我想思考对控制论的政治批判。自从诺伯特·维纳称控制论为一门控制科学以来,批评者就一直关注“控制”这个词。我们需要控制科学吗?我们控制得还不够吗?就维纳的控制论观点而言,这些问题问得很有道理,它源于诸如家用恒温器之类的工程控制机制,它确实试图控制并实现恒温,无论外界条件如何变化。但是我们应该注意到,这种控制在极其复杂的系统中是不可能的。正如我刚才所讲的,我们永远不能,对它们发号施令,我们永远无法掌控它们。面对这样的系统,我们能做的充其量就是与它们相处,希望在一个非层次性的过程中让它们参与到我们的活动中,另一位控制论者戈登·帕斯克(Gordon Pask)认为可以将这一过程称为对话。英国控制论中的控制是类似对话的意思。控制论的批评者应该对英国控制论很感兴趣,因为它是一个独特的分支,作为一种阐述该领域最有价值的特征且不会没有助长专制结构的方式。
大脑

我希望大家都能看到这张照片 。这是一张1950年代初的照片,照片注释为“控制论四先驱”。这四位先驱之一,就是数学家诺伯特·维纳。维纳是右边戴眼镜的那位。但其他三位都是脑科学家。其中一位是美国人,沃伦·麦卡洛克(Warren McCulloch),左二,他是著名的梅西会议的主席。另外两位脑科学家是在精神病院工作的英国人——右边第二个是格雷·沃尔特(Grey Walter),最左边的是罗斯·阿什比(Ross Ashby)。所以,英国控制论最初是一门关于大脑的科学,这是我现在想要讨论的问题。
关键在于,尽管控制论是关于大脑的科学,但它对大脑是什么却有着不同寻常的理解。我们通常认为大脑是认知和再现的器官——理解——大脑理解事物,这就是主流人工智能的主导思想,从1950年代中期的计算机程序到今天的神经网络一直都是这样。因此强调控制论在对大脑的理解方面与传统AI截然相反非常重要。正如阿什比在1948年所说, “大脑不是一个思考机器,它是一个行动机器;它获取信息,然后对其进行处理。”英国控制论的最初目标正是将大脑理解为一台行动机器——它会为大脑建立电机模型。模型之于控制论就相当于传统人工智能中的编程。根据不可知性的非传统本体论,控制论大脑的主要功能被理解为探索和适应未知,阿什比和沃尔特都就此制造出了相应的设备。

格雷·沃尔特和他的妻子的照片,他们的宝宝,还有右下角的机械龟,这幅照片的标题是 “这对父母有两个孩子:一个是电子的。”
首先,我来谈谈格雷·沃尔特。他以他在1948年制造的机器而闻名,因为机器的外形,它们通常被称为“乌龟”。乌龟是沃尔特1953年著作的核心,书名为《活的大脑》(The Living Brain),这就是他设计的机械大脑的样子。

这是乌龟大脑的电路图
这些乌龟是小型移动机器人,它使用光电管来定位和追踪亮光,同时进行来回运动以绕过遇到的任何障碍物。

这是乌龟的内部结构,穿过前轮的轴顶部装有光电管。

乌龟的内部结构,穿过前轮的轴顶部装有光电管。这是一张延时照片,记录了乌龟生命中的两分钟,亮线是它从底部向上的移动路线。它在中间跳过了一些东西,这是试验区内设置的一个障碍。
这些乌龟所表明的关键点是它们体现了控制论关注行动而非知识。它们没有像传统的人工智能机器人一样尝试绘制和理解它们的环境。作为替代,它们实时探索了由灯光和障碍物组成的世界,并对实时出现的任何事物做出反应。因此,乌龟的“智能”依赖于来自世界的反馈和一种在世界上进行的具象化的循环,而不是内部计算。在我们结束谈论这些乌龟之前,值得一提的是,乌龟启发了一项非常成功且广为人知的发明,即情境机器人,它是由罗德尼·布鲁克斯(Rodney Brooks)于1980年代在麻省理工学院重新发明的。
从长远来看,对英国控制论的发展更重要的是罗斯·阿什比的模型大脑,他将其称为稳态,并在他1952年的著作《大脑设计》(Design for a Brain)中进行了介绍。

这个图片上实际上有四个稳态器,这里的每个盒子都是一个稳态器。这是稳态器的接线图,也可以叫稳态大脑。每个盒子里面都有这个简单的电路。
像乌龟一样,稳态器也探索了它的世界,虽然它是靠电流而不是物理的方式进行的探索,但它在重新配置自己的内部运作方面更进了一步, 以响应它在探索中发现的东西——这里我需要解释一下它的操作步骤。
这个稳态器是一种电机设备,可将电输入(从左侧输入)转换为输出(该类型是从右侧输出的)。孤立地看,其中每一个盒子都是一个内稳态系统,它是惰性的,它什么也没做。但是阿什比尝试了多种稳态器的组合,其中一个稳态器可以被认为是大脑,其他的可以被认为是大脑的环境。当几个稳态器像这样连接在一起时,就会建立反馈回路,并且稳态器的组合可能会变得稳定起来——这意味着它们内部的电流趋于零——或不稳定,电流趋于增长。如果设置不稳定,则每个稳定器内的步进开关(该图右侧的F框)将移动到下一个位置,随机改变电路参数,该过程将持续进行,直到达到稳定平衡。因此,稳态器就是阿什比所说的超级稳定机——无论初始条件如何,它都会与环境达到平衡的状态。
这说明了什么呢?我认为这些多稳态设置就是本体论剧场,是我一开始描述的控制论世界观的物质模型。在认知意义上,“稳态大脑”对它的世界一无所知。取而代之的是,它通过其电流输出以实践行为探索世界,并对返回给它的输入做出适应性反应。所以,如果你想掌握控制论的本体论,只要把世界想象成一堆稳态器,就像这张图片里的一样,你就有了大致的概念。之后英国的控制论历史可以看作是对这种稳态本体的变化和阐述——我将在后面作进一步的阐释。稳态和类稳态耦合的核心是英国控制论与其他地区的控制论之间最明显的区别。
要继续谈英国控制论的故事,我们还得接着看大脑。阿什比建立了一个自适应系统,即稳态,他称它为大脑,他自己的模型大脑。十年后,另外两位控制论学家斯塔福德·比尔(Stafford Beer)和戈登·帕斯克(Gordon Pask)将此逻辑颠倒了过来,认为自然界中发现的任何适应性系统在某种意义上都已经是大脑。比尔最喜欢的例子是一个池塘,一个盛满水的池塘。他的观点是池塘的生态系统是适应性的,由于池塘中的各物种间的平衡对其环境的变化做出了积极地反应,就像重新配置稳态一样。这个想法实质上就是比尔和帕斯克非常富有想象力的“生物计算项目”( biological computing project)的起源,该项目的目标正是利用自然界中发现的生命系统作为人类组织的控制器——例如,工厂里的经理。他们想要引入池塘从而摆脱人类管理者,这是一个很妙的想法!
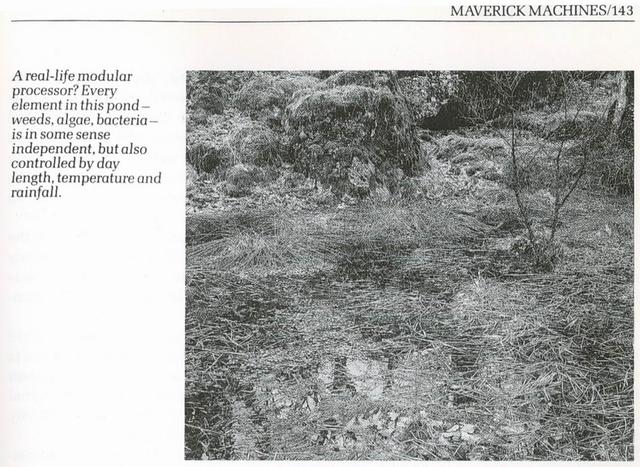
戈登·帕斯克在他的书《特立独行的机器》( Maverick Machines)中,插入了一张照片来阐述这个想法,这是一张池塘或沼泽的照片,左上角的标签上写着 “现实生活中的模块化处理器?”
遗憾的是,这个“生物计算项目”在1960年代初期以失败告终——当时它一无所获,但不是因为任何原则问题,而是因为实际操作上的困难,要获得像池塘一样的生态系统来处理工厂的关键变量是无法实现的。
从另一个角度来看,阿什比的稳态大脑形象启发了一种治疗精神病学的激进方法,这是另一个话题了。在治疗精神病方面,与生物学和精神分析方法不同,在1950年代,另一位英国控制论学家格雷戈里·贝特森(Gregory Bateson)将精神分裂症与他著名的“双重束缚”理论联系了起来。在双重束缚的情况下,孩子和父母无法找到令人满意的方式一起继续相处,贝特森将其类比为稳态器被锁定在一种病态振荡中,贝特森认为这会最终导致一个人变得疯狂。1960年代,罗纳德·莱恩(Ronald Laing)和他的同事在伦敦的金斯利院对这类精神病进行了实践研究,该研究院雇佣精神病医生和精神病人同吃同住在一个屋檐下。

金斯利院
由莱恩领导的反精神病学运动,正如人们对这个运动的称呼,是为了废除像电击和药物这样的正统疗法。取而代之的是,精神科医生会穷尽一切手段和方法走进那些原本不善交流的精神分裂症患者的内心——例如,利用打斗和咬人的动物行为,以期打破双重束缚并找到新的平衡。就像稳态器一样,在内部相互重新配置自己,这样精神病学家和精神病人会在这个开放式实验的过程中做出改变,成为新的自我——用莱恩的话说,就是精神病人教理智的人如何发疯。同样,就像生物计算一样,这是一个极具想象力的项目,用新的方法处理旧的事物。
所以,脑科学作为新的人工智能、机器人学、精神病学、生物计算——大家应该能从我试图展示的这些内容中大致感受到英国控制论的范围和多样性。现在我们可以谈一下大脑之外的科学,先来看看社会科学领域吧。
大脑之外:组织与管理

1960年代中期的斯塔福德·比尔,一个成功的英国商人的形象
从1960年代起,斯塔福德·比尔率先将控制论扩展到理解和设计社会组织的领域。生物计算是设计社会组织的第一步,但比尔后来的研究集中在被他称为可行性系统模型 (VSM) 上,这在今天仍然是一种重要的管理方法。以人类神经系统为模型,VSM将组织分为五个层次,从生产到计划再到更高的管理,所有层次都通过反馈循环联系起来。

屏幕左边是一个VSM图表,可以看到五个不同的层级在与环境交互,环境就是左边那个不规则的形状。它类比了人类中枢神经系统,就是右边的那张图表。
VSM组织管理理论最引人注目的实践是1970年代初期,该模型被用于阿连德政权下管理智利经济体的工具,但这个尝试在1973年的皮诺切特政变中不幸夭折。另外一位演讲嘉宾会在本系列讲座中介绍赛博协同控制工程,所以我在此就不细说了。但我要强调的一点是,VSM 各个级别之间的联系(以及与组织环境的联系)应该是类似稳态的,各个级别之间反复进行输出和接收,直到达成某种共识的平衡(这种输出和接收由这个VSM图右侧的上下箭头所表示)——这是一个被比尔称为 “互惠否决”( reciprocal vetoing)的过程,也被称作来回控制,就像由阿什比的稳态器建模。例如,在第4层管理层可以向第3层计划层提出生产方法的变更,但计划者随后可以评估这些变更并将不同的变更建议返回给第 4 层的管理层等等,这些都是围绕反馈反复进行的循环,正如大家在图中所看到的那样。

这是著名的赛博协同控制工程的控制室照片,智利把该项目命名为赛博协同控制工程
我强调这一点是因为它与我一开始提到的权力和控制问题有关。智利的赛博协同控制工程项目被批评为技术官僚主义,但上述提到的这些稳态耦合实际上是为了在整个组织的各个层面对称地分散权力和决策。它与传统管理的自上而下的结构形成了对比,在传统管理结构中,命令向下流动,箭头向下,没有任何反馈,没有任何自下而上的返回箭头——例如,在今天的英国大学中,大家对等级管理已经非常熟悉。正如比尔所说,与传统管理相比,VSM旨在最大化组织自由。
此后直到比尔2002年去世,他一直专注于组织 VSM 中各个级别之间的这些稳态相互作用的方法。他先是邀请经理和工会领导人在周五下午下班后到他的办公室喝威士忌,希望酒精会缓和气氛,促进各方在变革转型中对稳态持开放的态度。后来,他设计了一个他称之为“协同整合”( Syntegration)的协商过程,在这个过程中,决策者被分配担任概念几何图形的一条边,实际上是一个二十面体,并且协助其顶点之间进行几天的交替讨论,就像一个稳态器的星群不断试探彼此的状态已趋达到平衡态一样。

赛博协同项目失败后的斯塔福德·比尔

二十面体的协同整合模型
有两点值得注意。首先,图形和人的排列,是完全对称的,没有特权中心。 每个节点和每条边都等价于任何其他的节点和边。比尔因此认为协同整合是一种完美的民主形式。这很有趣,不像传统的有主席和固定议程的委员会,或诸如那类的组织。
其次,值得一提的是,协同整合指向了一个关键的控制论变量,即多样性。多样性是衡量系统可以处于多少不同状态的指标。因此,我们刚才看到的阿什比标准配置的四个稳态器的多样性相对较低,并且可以在短时间内达到平衡。但阿什比在1950年代表明,随着多样性的增加,达到平衡的时间呈指数增长,很快就超过了宇宙的年龄。这一直是激进民主实验所面临的实际问题。众所周知,1960年代欧美组织完全民主机构的尝试因无法达成绝对的集体性决定而失败,每次都以参与者筋疲力尽、打瞌睡或回家这样无疾而终,最近的占领运动又重蹈了这一覆辙。让每个人一直与其他人争论是行不通的。它从实践上就不可行。协同整合的伟大成就是将多样性减少到实用的水平,并通过其几何排列解决了这个问题,而不强加任何等级。它与传统的等级政治安排形成了鲜明的对比,例如选举。
艺术
迄今为止,控制论发展的另一条线索是在艺术领域。另一位英国控制论家戈登·帕斯克(Gordon Pask)是这里的关键人物,艺术领域的控制论就是从1950年代初期帕斯克的“音彩”机开始的。

戈登·帕斯克

右上角左边的就是“音彩”( Musicolour)机。 右下角是该乐器正在进行表演。
音乐家进行即兴的音乐表演,表演作为信号输入“音彩”机,然后机器根据输入来实时调制灯光秀,打造出灯光和声音混合的多媒体场景。在1960年代,这么做非常酷。“音彩”机的主要特点是,它在斯塔福德·比尔的术语中是一个极其复杂的系统。它的内部参数在任何表演过程中都会发生变化,因此无法从认知上掌握它。你不知道它接下来会做什么。与声音输入和光输出之间的线性关系不同,机器会适应每一场实时表演,最终它会像帕斯克所说的那样“感到无聊”。它会停止响应重复的输入,从而鼓励人类表演者(音乐家)反过来适应机器并尝试创作新的表演。然后机器会再次感到无聊,依此类推,人和机器之间相互影响。
这便形成了一个多稳态设置的版本,人类表演者开放式地探索并适应不可知的机器,反之亦然,机器也在适应表演者。现在,作为一件艺术品,虽然大家可能觉得有点奇怪,但我们可以再次将“音彩”机视为本体论剧场,它向我们展示了如何将控制论的本体论运用于实践,它类似稳态的系统,在运行互动中适应彼此。我经常将控制论艺术作品视为本体论的教学法,以非语言的方式教我们关于不可知性的本体论。
“音彩”机向我们展示了被应用于实践的本体论。控制论艺术的整个传统已经发展起来,尤其是自1960年代以来。接着来看帕斯克,他设计了一个互动剧场,观众可以在其中与表演者合作,实时构建戏剧的发展,1968年,帕斯克展出了一组名为“运动的对话”( Colloquy of Mobiles)的动态雕塑,展出地点是著名的1968年伦敦展览“控制论的意外发现”( Cybernetic Serendipity)。该展品展示了五个互动机器人,它们通过光和声音像多个稳态器一样进行交流。

这就是互动剧院的逻辑图,观众与演员交流,不断地影响着戏剧的发展走向。这是前几年,保罗·潘加罗对“运动的对话”的重制。
帕斯克还为交互式建筑的发展做出了重要贡献,他在1960年代初期为伦敦设计了一个名为“游乐宫”( Fun Palace)的建筑。虽然它从未真正建成,但游乐宫所设想的是一个公共建筑,在使用中可重新配置,响应不同的使用模式,但也像音彩机一样,它会感到无聊,从而鼓励人们不断寻找新的用途和活动、新的方式。

带有各种移动元素的游乐宫的示意图,顶部有大型起重机来移动相应的部件。

游乐宫顶部透视建筑图

游乐宫建筑图纸
环境
到目前为止,我举的例子都是在回顾历史,所以在结束之前,我想谈点更接近当下并且可能对未来很重要的东西。我最近一直在写关于环境的新控制论方法——关于洪水、农业和野火,这些都是非常重要的话题——我将就此谈一谈。
在1960年代后期,格雷戈里·贝特森——我之前提到的那位治疗精神分裂症的医生,开始非常关注环境危机。他的基本想法很简单——环境本身是一个极其复杂的系统,我们永远无法完全理解或掌握。根据贝特森的说法,这意味着有针对性的蓄意对环境进行干预可能在某种程度上奏效,但也可能产生意想不到的不良后果,这是因为我们不理解这样做对环境意味着什么。在1960年代,人们会想到雷切尔·卡森的名著《寂静的春天》,该书于1962年出版,书中讲述了农药确实可以杀死农作物害虫,但结果也毒害了所有的鸣禽,因此听不到鸟叫的春天变得无比寂静。今天,我们可能会更广泛地思考人类世——例如,燃烧化石燃料确实可以发电,但也会导致气候变化和全球变暖这一不受欢迎的副产品。
这就是贝特森发现的问题。他的解决方案很简单,就是我们应该学会以不同的方式思考, 我们应该放弃想要掌控自然的幻想。但我认为控制论使我们能够走得更远, 想出不同的行动和思考的模式这涉及将来回反复实验运用于环境研究上,这个实验我们之前讲过,即在阿什比的稳态器模型上寻找集体平衡态,我可以举个例子来对此操作进行说明。1963年,巨型的格伦大峡谷大坝于在美国科罗拉多河上落成,用于控制水流和河流发电。

大坝是图中右边的巨大结构,图片左边大坝后面的是鲍威尔湖。
但建造这座大坝的意外后果是破坏了大坝右侧的河流下游生态系统,该生态系统中包括非常著名的景点大峡谷。沙洲开始消失,当地物种濒临灭绝。但问题是,人们对此感到一无所措。直到1983年,人们终于找到了点解决问题的眉目,当时大坝上方的鲍威尔湖有洪水泛滥的危险。无奈之下,工程师们通过大坝释放了大量的水,实际上就是在河流上制造了一场人工洪水,而这场洪水竟然产生了不可思议的良好收效,它重建了沙洲及其相关的生态系统。
然而这种积极的影响只是暂时的——沙洲很快又开始被侵蚀——于是人们建立了格伦大峡谷适应性管理计划(AMP),该计划一直延续至今。AMP包括定期在河流上制造人工洪水,研究下游生态系统的反应,并据此调整后来的人造洪水——大坝管理者与河流以及生态系统之间的另一次“能动性之舞”的过程。

那是正在进行的人工洪水的图片,现在图片左侧的大坝正在释放大量的水。
关于这个适应性管理计划,我想提出两点。首先,它很明显是一种控制论。不同于贝特森所批评的命令和控制立场,我们取而代之地发现了多稳态模型,大坝管理者和河流、大坝溪流生态系统一起,寻找开放式的、运行性的集体平衡。其次,AMP以一种有意思的方式奏效了。
AMP并不是抵制环境恶化的永久性解决方案。在没有洪水的时候,沙洲仍然会被侵蚀。但事实证明,如果科罗拉多河的人工洪水与大坝下方连接科罗拉多河的另外两条河流的天然洪水同步发生,那么沙洲生态系统就会或多或少得以维护。诀窍在于,人工洪水携带着自然洪水带来的沉积物,使沙洲生态系统得以维持。令我震惊的是,这种同步将人类大坝管理者的行动与河流紧密结合到一起,仿佛经过一场我前面提到的概念“能动性编舞”——人类和非人类之间能动性和谐互动的过程被规范化了。
这种编排让我很感兴趣,因为它是一种与环境互动的不同方式,我们没有一个合适的名字来命名这种方式,它是一种与自然共同行动的方式,我们适应并顺从自然,这与我们一贯的行为形成鲜明对比,自1960年代和人类世以来,一直如此,我们以往的所作所为招致了很多麻烦。我认为这种对自然和环境的稳态调整指出了控制论发展的重要途径。
宇宙技术
我一直在回顾英国控制论的历史,从机器人和精神分裂症到自适应架构,再到现在的科罗拉多河,并以稳态和不可知本体论作为主线。最后,我想从另一个角度进行总结,通过思考许煜所提出来的宇宙技术的概念。我认为,宇宙技术这个词的意义在于表明技术不是一种普遍的事物。这并不是说人们在任何时间和地点都找不到可以称为“技术”的东西,而是说不同形式的技术(技能、工艺)与不同的宇宙论或本体论联系在一起本体论是我一直在使用的一种说法。不同的本体论将引入不同的技术范式,反之亦然。例如,伟大的中国科学文明史学家李约瑟就区分了儒家和道家的行事风格。后者试图以某种方式顺势而为,道法自然,而这种道教行事风格体现在了中国岷江上古老的都江堰大坝,它会根据水流量的不同而采取相应的对策、措施。根据李约瑟的说法,儒家的行事风格与道家相反,它试图通过人们所熟知的行动策略例如建造堤坝等,来控制河流。
我想说,控制论很好地说明了宇宙技术内在的技术和本体之间的联系,实际上它支持李约瑟所提出的道教方式。我们可以说,控制论及其不可知性本体论是宇宙技术范式的一部分,它与现代科学和工程中的命令和控制范式及其可知性和可控性本体论截然不同。
这种技术范式差异的最明显例子是控制论生物计算项目,正如我所说,该项目旨在借鉴生物系统的活力,并将它们引入人类管理世界。这与传统计算机处理技术形成鲜明对比,传统计算机处理技术不依赖于物质的活力,而是相反:将硅芯片归化改良到原子水平,然后编写计算机程序来指导它们精确地做什么,并发挥什么作用。因此,这两种范式在硬件层面存在很大差异:池塘与硅芯片。可以说反精神病学和主流精神病学之间的对比也是大致相同,反精神病学倡导完全不使用硬件,而主流精神病学主张使用手术刀、电击机和精神药物等手段。
但是,让反差取决于硬件会产生一个问题,因为我的其他控制论示例实际上使用的硬件与构建现代对应物的硬件大致相同。 例如,控制论机器人使用了许多与人工智能机器人相同的组件。科罗拉多大峡谷的适应性管理依赖于通过格伦峡谷大坝的水流,而这大坝正是造成生态问题的罪魁祸首。这说明了什么呢?
关键是,在考虑宇宙技术时,我们不应该只关注硬件,还应该关注硬件的布局配置方式。 我们可以说,相同硬件的不同布局会让人联想到不同的世界和本体。人工智能机器人的传感器和制动器被配置并响应已知世界,而控制论机器人中的相同组件则用于探索和响应未知世界,只是因为配置不同。 因此,我们需要在这里考虑一种前景/背景格式塔,其中一种本体论脱颖而出,因为它对技术组合进行了巧妙的设计。即使在材料技术相同的情况下,这也是思考宇宙技术的方式。
关于宇宙学的最后一个想法。我一直在谈论不可知性的控制论本体论,并将其与可知性的科学本体论进行对比。但值得一提的是,除了这种对比之外,控制论本体论与非现代、非西方和神秘的宇宙论有许多积极的联系。这是值得注意的。我刚才提到了控制论与道教的关系,英国控制论者也对此进行了很多类比。例如,在贝特森关于精神分裂症的研究中,他与艾伦·瓦茨(Alan Watts)进行合作,瓦茨是一位在西方世界普及佛教的人,而瓦茨在解释佛教概念时反过来借鉴了控制论。不可知性的概念与无限的神秘体验直接相关,斯塔福德·比尔以此为依据来论证上帝的存在。比尔同样对九点阵规图十分着迷。他发现它在“协同整合”图表中重复出现了很多次。他也对印度哲学着迷,除了担任管理顾问外,他还学习和教授密宗瑜伽。

九点阵规图
最后的最后,思考宇宙技术可以在很多领域对我们有所帮助,从英国控制论的实践项目和艺术作品到明显非英国式的宇宙学、世界观和宗教。对我来说,这展示了英国控制论是一个多么奇特而美妙的领域。
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com