机器人轨迹路径设置(机器人坐标系介绍及轨迹点修改)
坐标系是指机器人或空间上的位置指示器系统,用于确定机器人的位置和姿态。
坐标系包含:1、基坐标系(Base Coordinate System)2、大地坐标系(World Coordinate System)3、工具坐标系(Tool Coordinate System)4、工件坐标系(Work Object Coordinate System)
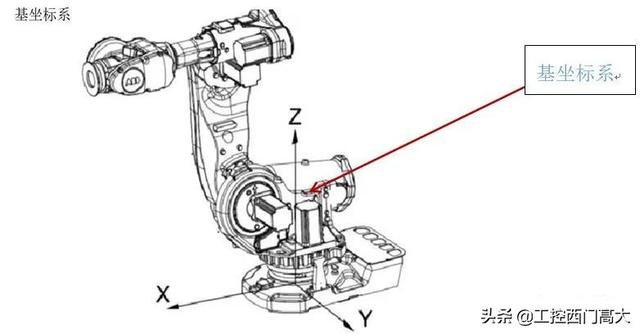
1. 基坐标系
基坐标系是以机器人安装基座为基准、用来描述机器人本体运动的直角坐标系。
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。坐标系可用右手准则判断:
2. 大地坐标系
大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合:
(1)机器人倒装。
如图倒装机器人的基坐标与大地坐标Z轴的方向是相反,机器人可以倒过来,但是大地却不可以倒过来。
(2)带外部轴的机器人。如图1-1,大地坐标系固定好位置,而基坐标系却可以随着机器人整体的移动而移动。
3. 工具坐标系
工具坐标系:是以工具中心点作为零点,机器人的轨迹参照工具中心点,不再是机器人手腕中心点Tool0了,而是新的工具中心点如图。
在焊接的时候所使用的工具是焊枪,可把工具坐标移植为焊枪的顶点。而用吸盘吸工件时使用的是吸盘,所以我们可以把工具坐标移植为吸盘的表面。
4. 工件坐标系
工件坐标系:工件坐标系是以工件为基准的直角坐标系,可用来描述TCP运动的坐标系。
充分利用工件坐标系能让我们编程达到事半功倍的效果。
机器人加工工件1,轨迹编程已经编好,另外有工件2,轨迹不需要重复编程只要把工件坐标系1改为工件坐标系2即可。
这里说安川的修改轨迹点,当然要有一个需要修改点的程序,以及该程序中所需要修改的示教点。首先打开你想要修改点的程序。然后,依次点击界面上的【实用工具】-【平行移动程序】如下图。
完成上一步后下图所示的界面将出现。
上图是设置界面,其中各编号后面需要设置的内容如下:1. 选择你需要做点修改的那个程序;2. 该程序中需要改变的点的序号(这个后文说明怎么开启点的序号);3. 修改后的程序的名称(如果选跟编号1相同的程序,则会覆盖此程序;如果输入一个新名字,那么则会新建一个程序,然后把修改后的程序放到这里);4. 需要偏移的坐标,有关节坐标,基座标,机器人坐标,用户坐标以及工具坐标可选;5. 偏移的方向以及距离。
按照上图所示数据,将编号为5后的内容的X后面输入5,那么就会把这个程序中的编号为0001和0002这两个点沿着基座标X的方向平移5mm。
针对于怎么打开示教点编号,还是看图1上。【实用工具】图标的左边有一个【显示】,点击一下它,则会出现下图所示界面。选择【激活程序点编号】。
接下来,你会在程序中看到如下界面,下图中红框框起来的就是此行程序点的编号。
这样比示教的方式修改点就方便了。
,











免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






