轧钢机的plc设计(酸轧机组自动控制系统的设计与应用)

“2016第三届轨道交通供电系统技术大会”演讲报告图文版已在“电气技术”微信(dianqijishu)上陆续发布,请感兴趣的读者扫描下方二维码,进行关注阅读。
本钢板材股份有限公司采购中心的研究人员胡冰,在2016年第9期《电气技术》杂志上撰文,针对酸轧机组生产线特点,结合工程项目情况介绍了酸机组自动控制系统的设备组成和控制方式,该系统的核心控制功能包括张力控制、自动板型控制、自动厚度控制。
系统已成功应用于国内某酸轧机组生产线,运行稳定可靠,提高了整个产线的自动控制能力。
随着国内现有生产线能力的扩大和一大批新建生产线的投产,冷轧带钢市场已经出现严重的产能过剩、供大于求的现象,要在激烈的竞争中占领市场,必须进一步降本增效,提高质量。冷轧技术[1]和工艺的日趋成熟,在轧制技术上寻求突破已很难提高产品质量,因此冷轧的上一道工序酸洗越来越被重视。
本文以国内某酸轧机组生产线的酸洗过程自动控制系统为背景,介绍轧制过程中的调节原理和简述该生产线的主要电控系统。
1 轧制调节原理
本节重点说明张力控制、自动板型控制、轧机自动厚度控制的技术原理。
1.1 张力控制
在带钢正常轧制过程中,根据工艺的需要,带钢张力应保持恒定,这是张力控制的基本要求,因此该功能提供轧机机架间带钢张力水平控制。测量张力的方法是在张力辊轴承下面安装压力传感器,测出张力辊承受的压力,再根据力的平衡条件计算出张力的大小。
机架间张力控制有两个模式。如果满足所有的转换标准,那么每个机架间的张力控制模型可以被转换。初始化机架速度和轧制力设定来自于轧机设定功能。
图1 两个机架间张力控制原理图
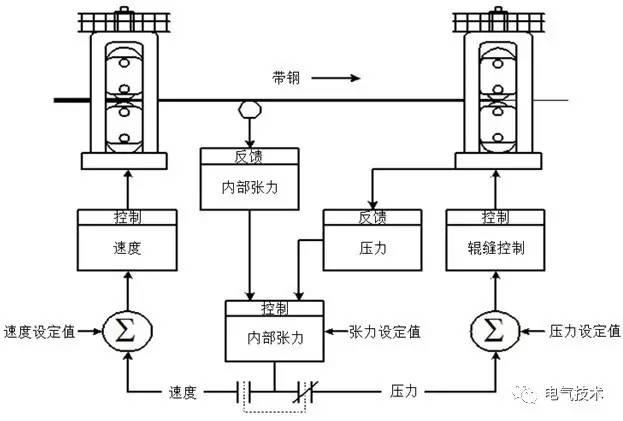
张力由速度变换点下游机架速度调节。变换点由上游和下游张力确定,上游张力调节是从速度控制模式转换成轧制力控制模式。当控制满足变换标准时,速度控制模式停止,自动转变成轧制力控制模式,此时调节轧制力的恒定来保持带钢张力力度[2]。
在调试过程中软件调节范围外的张力调节器不允许改变轧制力调节参数。当带钢从开卷机到卷取机穿带完成后,系统首先建立静张力,静张力的设定值由系统根据稳定运行时机组张力的百分比给定。建立静张力过程时,开卷机顺时针方向旋转,卷取机拉紧带钢,带钢张力达到给定值后,开卷机处于静止赌转状态。
当控制系统接收到机组的运行指令后,开卷机和卷取机同时逆时针方向旋转。此时开卷机速度给定值的方向为逆时针方向,速度给定值的大小低于卷取机给定值,使开卷机速度滞后卷取机的速度,因此机组加速过程实质是卷取机拖动开卷机加速旋转。
最优闭环控制是在使用张力控制来防止板型问题和带钢断带的厚度控制,同时也包括高配置的张力死区来执行张力限位类型控制来调节机架速度。但有时涉及到带钢模式,小下压量模式用于末架在生产一些产品时需要采取很小的压下量的情况。轧机设定参数维持速度模式控制末架张力调节来完成整个产品的生产。
1.2 轧机自动厚度控制
自动厚度控制是使用机架轧制力和速度,通过一个或者多个速度传感器的反馈值来控制带钢厚度,最优化的厚度控制需要将合适的传感器放置在正确的位置执行多回路控制。在上游机架的厚度控制要比稍后机架的厚度控制有效率。
主要控制类型描述如下:
(1)前馈AGC是在到达轧制位置前提前测量来料带钢偏差并追踪将要采取校正动作的轧制位置。对应机架需要一个上游测厚仪。调节包括辊缝,上游机架速度,或者两者同时。例如,通过1机架S1出口测厚仪X1测量达到的带钢厚度误差被采样并追踪到2机架S2轧制位置。当带钢对应段临近S2轧制位置,适当的误差校正将到达S1的速度。同时相应的在s2发生交互的辊缝控制来维持机架张力调节;
(2)反馈AGC是反馈控制测量一个机架出口的带钢厚度偏差并使用该信息来进行上游调节。通过一个适当的函数,将机架出口厚度偏差乘以超差的数量。结果作为机架需要改变的辊缝位置的控制信号。调节器补偿给位于机架内设备和仪表的执行单元。
一些厚度偏差无法由前馈控制系统检测,而且又无法及时的通过反馈系统纠正。这些偏差包括来料硬度的变化,加速过程中由于轧制方式和轧制摩擦的改变造成的打滑。秒流量控制要求在轧制一段距离后等于机架出口厚度。这就通过避免带钢到达下游测厚仪前等待过程中的传递误差达到提高AGC性能的目的,需要一个入口测厚仪和速度计以及一个出口测厚仪。
简单来说,秒流量就是进入轧机的等于从轧机出来的,在宽度不变的情况下:
秒流量公式所需要的信息包括上游和下游的测厚仪提供所需要的厚度值,根据速度计计算的入口和出口的长度。如果出口速度计故障,系统根据自适应秒流量控制和前滑值计算出口长度。前滑通过比较计算厚度和出口测厚仪的测量厚度进行自动更新。
2 电气设备与系统组成
2.1 传动系统组成
5架轧机的传动装置主要有5台主驱动器、143台调速电机、定速电机和加热器等装置共计271台、连接的总负载61514kW/h。机架No.1由一台主驱动电机传动,电机的主要参数为:额定功率5470kW、电压1890/2020V、电流1890/1850A、转数297/913rpm、功率因素92%/89%;机架No.2-No.5的驱动电机参数均为:额定功率7800kW、电压2700/2880V、电流1890/1810A、转数424/1300rpm、功率因素92%/90%。
电机类型均是TMdrive-70e2,它是一种全数字化矢量控制的三电平的脉冲宽度调制(PWM)变换器(交流转换直流)和逆变器(直流转换交流)电机驱动系统,对大型的轧机电机驱动系统来说是完美的选择。注入增强栅晶体管(IEGT)使一个电压驱动功率器件具有低电压和高速转换能力。考虑到应用需求,总体来讲,它既适用于鼠笼型感应电动机也适用于同步电动机的应用需求。
2.2 基础自动化系统组成
基础自动化系统是用东芝三菱电气现金的控制解决方案实现,系统的构架图是用来描述典型的主要过程控制系统,通常使用的控制系统结构包括软件功能层次结构,由指定的一个级别描述。设施根据它们自己的特殊需要使用软件功能层次架构中的不同级别。
所提供的特定设备和功能将用于指定的其它地方。而过程控制中一级提供了对过程电气设备、液压和气动执行器的直接控制。闭环工艺控制,各种位置调节器,测序和设备保护功能都包含在这一级中。通过各个区域启动设备运行的物料微跟踪,为2级宏跟踪功能提供支持。
二级提供了熟悉过程模型和复杂的工艺功能加上准实时控制功能所需的软件基础。在工厂运行期间,2级提供给过程控制(1级)参考值,接收程序反馈用于模型更新,宏跟踪,数据采集和报告。有限的闭环控制功能也包括在2级里[3]。
2.3 过程自动化系统组成
过程自动化系统通过四部分网络与以下系统通讯。高可用性解决方案提供了一种增强系统在线实用性的方法。
具体方案如下:我们将提供具有很高连续性的Stratus FtServer-W服务器作为这个系统的2级服务器。在一个组件发生故障时,冗余系统备用件组件,从而保证继续工作,避免停机。二级系统由2套FtServer服务器组成,每套FtServer服务器有双冗余。
控制局域网通讯和变更检查子系统提供二级系统与TMEIC主控制局域网的通讯。该控制局域网是二级系统与由控制器和驱动器组成的一级系统间主通讯路径。该子系统可以读取和写入局域网,并能监视某些信号的更改。用于每个控制产品应用程序可以进行独立配置。配置在产品重新启动后生效[4]。
2.4 宏观跟踪和微观跟踪概述
通常采用宏观跟踪和微观跟踪两种基本跟踪类型[5]。宏观跟踪是为了确定带钢在过程区域的特定逻辑区域内。被跟踪的每个过程区都有一个功能名,可以再分为几个区。在区域内的位置信息未知。
也就是说,在一个10米的区域内只有板坯进入和离开该区域时才能知道带头的位置。宏观跟踪通常通过二级计算机完成,并可通过识别区界线支持微观跟踪。宏跟踪区域是从入口步进梁到出口步进梁。微观跟踪不断确定材料指定部分的位置。
例如,连续跟踪带头后1米的某点位置,当该点到达指定位置后启动剪切操作[6]。微观跟踪通常在一级控制器内完成,传送传感器数据支持宏观跟踪。
3 结束语
该工程目前已投入试生产阶段,运行正常,理论和实践证明,全数字化矢量控制的三电平的脉冲宽度调制驱动系统应用于轧钢主传动,取代其它调速系统,是完全可实施的技术方式,特性指标可达到并超过其它系统,将大大减少设备的维修和维护量,有利于节省能源,提供生产,是国内外酸轧机组电气设备选型和发展的趋势。
随着计算机和电气自动化技术的发展,通过两化融合推进产线过程控制系统的的建设,持续提升基础设施,钢铁行业的自动化水平会更上一层楼。
进一步阅读,请点击左下角“阅读原文”,访问期刊官方网站,可免费下载全文PDF版。
诚邀杂志审稿专家
根据稿件评审工作需要,中国电工技术学会《电气技术》杂志编辑部拟请业内人士自荐审稿专家,阅读详情和报名请扫描二维码。
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






