pid为什么有时候效果不好(关于PID的一些知识)
PID调节时,如果单纯的P调节只要增益小,肯定能稳定(没超调),问题是稳态误差与增益成反比,单纯的P调节不能兼顾稳定性和稳态误差。PI或PID可实现超调小和无稳态误差。那么增加I积分项之后,为什么就能消除稳态误差了呢,见下图公式

式中误差信号e(t) = SP(t) – PV(t),M(t)是PID控制器的输出值,Kc是控制器的增益(比例系数),Ti和TD分别是积分时间和微分时间,Minitial是M(t)的初始值,实际上是积分的初始值。
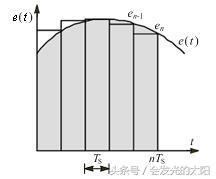
积分对应于下图中误差曲线e(t) 与坐标轴包围的面积(图中的灰色部分)。PID程序是周期性执行的,执行PID程序的时间间隔为Ts(即PID控制的采样周期)。
在系统处于稳定状态时,误差恒为零,比例部分和微分部分均为零,积分部分不再变化,并且刚好等于稳态时需要的控制器的输出值。因此积分部分的作用是消除稳态误差。
闭环系统没有积分作用时,单纯的比例控制有稳态误差,稳态误差与增益成反比。增益增大,稳态误差减小,但是超调量增大,振荡次数增加,调节时间加长,增益过大甚至会使闭环系统不稳定。

只要误差不为零,控制器的输出就会因为积分作用而不断变化。积分这种微调的“大方向”是正确的,只要误差不为零,积分项就会向减小误差的方向变化。在误差很小的时候,比例部分和微分部分的作用几乎可以忽略不计,但是积分项仍然不断变化,用“水滴石穿”的力量,使误差趋近于零。
理想情况是:在系统处于稳定状态时,误差恒为零,比例部分和微分部分均为零,积分部分不再变化,并且刚好等于稳态时需要的控制器的输出值
采样周期的确定原则
采样周期是调用执行PID功能块的中断程序的时间间隔。采样周期应足够小,保证连接采样时PV曲线上离散的点得到的折线能比较准确地复现PV曲线的特征。举一个比较极端的例子,如果下图使用的采样周期等于PV曲线的振荡周期的一半或者更大,两次采样之间PV曲线的变化信息完全丢失了,按照这样的采样值计算出来的积分和微分的近似值与准确的积分值和微分值相差十万八千里。
如果采样周期足够小,例如等于PV曲线振荡周期的1/20,计算出现的积分和微分的近似值就相当准确了。
采样周期也没有必要太小,太小了会增加CPU的负担,也没有什么意义。
微分的物理意义。
微分的主要作用是减小超调量,它为什么可以减小超调量呢?微分项与误差的变化速率de(t)/dt成正比,误差变化越快,微分项的绝对值越大。微分项的符号反映了误差变化的方向。在下图的A点和B点之间、C点和D点之间,误差不断减小,微分项为负;在B点和C点之间,误差不断增大,微分项为正。控制器输出量的微分部分反映了被控量变化的趋势。
有经验的操作人员在温度上升过快,但是尚未达到设定值时,根据温度变化的趋势,预感到温度将会超过设定值,出现超调。于是调节电位器的转角,提前减小加热的电流,以减小超调量。
在下图启动过程的上升阶段(A点到E点),被控量尚未超过其稳态值,超调还没有出现。但是因为被控量不断增大,误差e(t)不断减小,控制器输出量的微分分量为负,使控制器的输出量减小,相当于减小了温度控制系统加热的功率,提前给出了制动作用,以阻止温度上升过快,所以可以减少超调量。因此微分控制具有超前和预测的特性,在温度尚未超过稳态值之前,根据被控量变化的趋势,微分作用就能提前采取措施,以减小超调量。
微分时间TD与微分作用的强弱成正比,TD越大,微分作用越强。如果微分作用太强(TD太大),提前制动过度,将会使响应曲线变化迟缓,超调量反而可能增大。综上所述,微分控制作用的强度应适当,太弱则作用不大,过强则有负面作用。如果将微分时间设置为0,微分部分将不起作用。

免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






