智能船舶技术路线(智能船舶的分级评价)
随着全球航运业对智能船舶领域研究的深入,在船舶自主航行、自主靠离泊、能效管理等关键技术领域已经有了可行的技术方案及应用实例,行业对于未来的智能船舶航运提出了完整设想,例如,我国形成了智能船舶“一平台 多应用”的顶层设计框架。然而,对智能船舶及其典型系统的技术难度划分、自主能力评定的规则尚不够明确,量化评价指标尚不清晰,缺乏智能水平分级的综合方案及与之适配的验证手段。为此,在IMO关于自主船舶的公约梳理工作中、我国的智能船舶标准体系中,以及中国船级社的《智能船舶规范》体系中,均将船舶自主能力的分级作为一项基本且必要的内容,其目的是从功能特征的角度理清不同等级智能船舶的能力边界,明确智能船舶的能力等级,为监管、检验、保险、技术研究等各方面提供不同等级下的依据,并厘清评价的边界。
结合智能船舶的技术特征,形成符合其智能功能及操控特性的分级方案十分必要。基于技术发展现状,本文从分级方法的分析选择、分级方案的设计实践两方面提出相应的解决办法。
▣ 智能系统及装备的典型分级方法分析
1、通用型理论方法
根据智能船舶的发展路径,无人船是其发展的高级阶段,因此评价无人系统自主性的科学方法对于智能船舶及系统的等级划分具有重要的借鉴价值。目前,工业界常用的分级方法主要有等级法、双坐标轴法、三坐标轴法、查表法、公式法,蛛网评价模型、技术成熟度等级评价法等。
2、业内分级方案及实践
相关国际组织和机构都开展了对船舶智能系统及无人船的分级评价研究,但尚无统一结论。目前,可供参考的典型方案为:
1)AAWA——高级无人驾驶船舶应用开发计划
本项目由芬兰国家技术创新局资助研究,在2016-2017年由RR、Brighthouse NAPA、Deltamarin、DNV GL和Inmarsat等开展合作研究,目标是探究无人驾驶船舶实现所需解决的经济、社会、法律、监管和技术问题;为下一代高级船舶解决方案制定规范和初步设计方案。该计划对智能船舶的统一理解引用了Thomas Sheridan对自主系统的分级,它包括从人控制到机器完全自主的一个连续范围的划分。见下表:
表1 AAWA分级方案

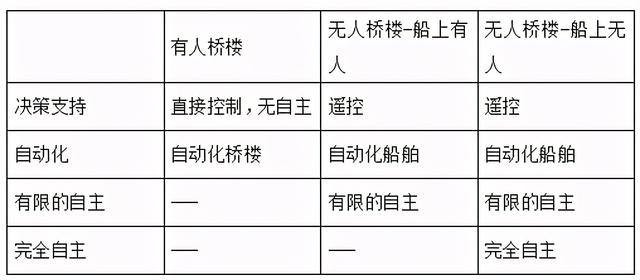
2)NFAS分级方案
NFAS侧重于对船桥系统自主操控能力的评价,该分级方案也限定了船桥自动化水平与船上是否有人的关系,其具体观点如下:
表2 NFAS分级方案
3)罗尔斯-罗伊斯公司分级方案
此方案主要关注在操作任务的执行过程中,人与系统的不同角色分工,分为控制角色(主次)、越控角色、系统任务能力三个方面,该方案可认为是对AAWA的裁剪或NFAS的扩展,其适用范围更广,技术描述也相对具体。
表3 罗-罗分级方案

4)LR分级方案
LR在单个系统功能上划分了AL0-AL6的7个自动化级别,具体分级及评价标准如下:
表4 LR分级方案

除此之外, BV从控制方法、决策、执行及人员是否在船上进行自主性分级,DNV-GL的卡片盒模型将船上各系统在自动化-性能面上的水平投影进行分析。对比以上各方观点可见,目前针对船舶自主性分级的方法,主要利用了等级法、查表法、经变形的坐标轴法。但对关键技术及主要能力的划分尚未达成一致。
▣ 智能船舶分级评价的基本框架
上述分级方案综合考量了“人-系统”的操控程度问题,但考虑到智能船舶对远程遥控、自主航行两个维度的综合评价需求,分级评价方案是否能够量化、影响因素间的耦合关系是否能够界定,是选取方案过程中需重要考量的问题,对现行方案的优劣比较为:
表5 主要分级评价方法的优劣比较

总体来说,船舶的智能水平评价包含遥控操作和自主操作两个方向。由于智能船舶所包含的场景众多(航行、靠离泊、进出港、锚泊等),不同系统间的时序或递进关系难以界定,基于目前智能技术的成熟度及行业需求情况,结合前文分析,本文通过蛛网评价模型评价法对船舶自主航行的操控过程进行评价,并给出量化方法。
首先,基于智能功能目标,给出船舶自主航行操作的总体分级方案:
表6 自主航行操作的分级评价

A*、人工势场等,其在船舶的应用重点在于与船舶动力学的结合。由于实际工作条件中障碍物位置与预先信息由相对误差,同时会出现无法预知的紧急障碍,对于船舶在突发情况下的避碰能力提出了要求。面对突发障碍的紧急避障,需要船舶具有良好的信息感知能力,同时有满足避障需求的算法精度、速度以及船舶操纵性。自主航行等级较高的船舶需要能够自主感知障碍并完成面对移动障碍的避碰,例如在真实场景中避碰并未事先感知的相向行驶船舶。
智能船舶航行的自主化等级根据操作者介入等级的不同,划分了航行场景下智能船舶的五个自主化等级。
其中,标记为D(辅助决策)的船舶具备航路设计及优化能力,R1-R2,以及A1-A3的船舶均覆盖了D级别的功能。R1级与R2级的船舶主要依靠手控或预载的程序进行控制,智能系统尚不具备自主能力;A1级开始船舶逐渐具备自主能力,其智能航行系统开始能够应对开阔水域下的避碰问题,但仍需要人工监测船舶运行;A1级至A3级的船舶自主性能逐渐提高,避碰能力逐渐由开阔水域扩展至狭窄水域,并最终实现完全自主的航行能力要求。
▣ 智能船舶分级评价的主要方法
为了综合衡量船舶的智能水平,本文采用AHP层级分析对一般船舶智能水平综合评价评分提供参考。实际评价中,采用两两比较标度法对因素之间重要度进行区分,一般推荐采用心理学家Saaty所提出的两两比较标度方法,即人类区分信息等级的极限能力为72。通过比较所得矩阵特征向量确定最终评分。标度区分登记表见下:
表7 标度区分等级表

据此对上述因素进行判断,得到判断矩阵。计算矩阵特征向量并将特征向量归一化,所得向量即可表征不同因素对于总体目标,即船舶综合智能水平重要度的权值。
以常见船舶为例,根据其实际工作中有关智能功能的重要度,采用两两比较标度方法对各个判断因素间的重要度进行对比标度排序,可以得到以下判断比较标度表:
表8 判断矩阵

从表中可以获取该船舶智能水平的判断矩阵,同时求解其特征向量w,w与判断的各个因素的重要度数值相对应,将w向量归一化,可以得到不同因素对应重要度,即所对应评分占比。具体的评分细则整理得下表:
表9 智能因素分值分配

在智能船舶的测试验证过程中,需将有关测试过程及指标归类于不同的自主等级中,并在船舶完成测试后根据测试结果获得相应评分,进而加权依据上述测算方法加权汇总得到综合评价分值。同时,由于不同船型、航线及执行任务对不同功能的依赖程度不同,针对特定船舶的综合评分可以在测试验证阶段根据实际情况对表中的判断矩阵进行调整,从而得到适合船舶类型的评价方案。
测试总分满分为100分,按照远程遥控、自主操控两个方向各自评价,并对分值区间进行均分(例如,评价自主操控等级时,按A1~A3均分为3个分值区间)。例如,某3000总吨的A型自主航行集装箱智能船舶,可在完成其规定如下试验项目(示意)后进行评分:
表10 评价结论示意

免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






