测绘坐标测量方法(测绘精选坐标转换概述)
引言:这篇“坐标转换概述”献给各位,可以对坐标转换有一个大致地、整体地了解。文中有些名词是为了便于表达而自创的,大家不用考据、较真。
一、静态坐标和动态坐标(1)静态坐标
传统大地测量没有考虑板块运动对坐标的影响。虽然板块运动客观存在,但在测量精度不高的情况下,可以假设在局部范围内构造运动为同向平移运动(板块刚性)。那么各点的绝对位置虽然在变化,但点之间的相对位置不变。

同向平移运动
1980西安坐标系(以下简称“西安80”)的天文大地点坐标是从大地原点引出的相对坐标。在同向平移假设前提下,坐标不会变化,可以认为是静态坐标。满足了注重相对位置的一般生产需要。
但是,同向平移假设并不严密。因此,还需要定期复测。
(2)动态坐标
现代空间测量技术可以直接获得点位相对于地心的坐标,或者相对于动态框架点的坐标。高精度的地心坐标必须顾及板块运动的影响。我国大陆上的地心坐标每年大约有3~4cm变化,主要体现在空间直角坐标的X分量。
动态坐标——随时间变化的坐标。
瞬时坐标——某历元时刻的坐标,必须标明其历元。
那么动态坐标如何来表达?
①点位在某历元的瞬时坐标。
②点位的速度。
如果知道该点在某历元的瞬时坐标和点位的速度,就可以计算该点在任意历元的坐标。
准确描述一个点的位置,应该具备三个要素:瞬时坐标、历元(框架),以及速度。
瞬时坐标的历元不一致,不方便使用和交流。需要在全国范围内约定一个统一的历元。
CGCS2000是一个动态地心坐标系,CGCS2000坐标如何来表达?
①CGCS2000坐标的参考历元是2000.0,即CGCS2000坐标必须是2000.0历元的瞬时坐标。
②建立全国速度场模型,用来计算国内任意点的速度。
如果知道一个点2000.0历元的瞬时坐标,用速度场模型算出该点的速度,就可以计算该点在任意历元的坐标。反过来说,无论任何历元的坐标都必须用速度场模型归算到2000.0历元,才算是CGCS2000坐标。
同框架同历元坐标——由一组同框架同历元坐标组成。
①点的坐标是瞬时的。
②所有点的坐标都是同一历元的,是统一的。
③一组同框架同历元坐标是静态的。
一组CGCS2000坐标必然是ITRF97框架、2000.0历元的同框架同历元坐标。可以看出,CGCS2000的坐标是静态的,加上全国速度场模型后,才成为一个动态坐标系。
如果一组ITRS或WGS-84坐标是ITRF2014框架、2019.5历元下的坐标,那么也是同框架同历元坐标,也是静态坐标。
注意:北京54、西安80是相对坐标,CGCS2000坐标是瞬时坐标,它们都是静态坐标,不存在每年大约3~4cm变化的情况。
二、静态转换和动态转换(1)静态转换
两组静态坐标之间的关系,无非就是平移、旋转和尺度变换。因此,通过重合点求转换参数就可以实现坐标的静态转换。
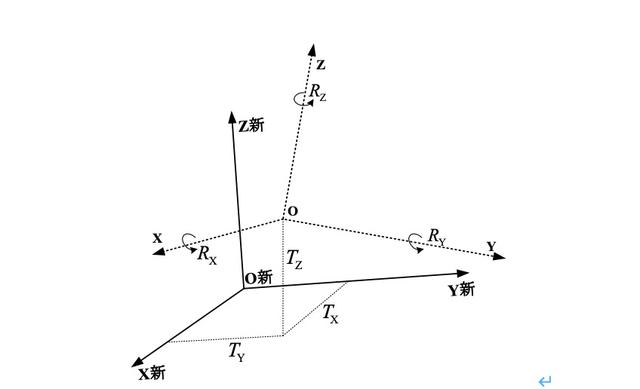
静态转换
典型的转换模型为布尔莎七参数模型(还有其他模型,适用条件不同)

也可以用图幅改正量或格网改正量内插坐标改正,实现坐标的静态转换。
(2)动态转换
不同历元、不同版本ITRF框架的动态地心坐标间的转换,分坐标历元归算和框架转换两步。
注意:本书中的坐标历元归算特指地心坐标的板块运动改正,不要和天球坐标的岁差历元归算混淆。
1)坐标历元归算的公式为


历元归算
2)参考框架间的转换公式为

需要强调的是:
①历元归算改正量随时间推移越来越大,例如2019.5历元的坐标归算至2000.0历元,改正量约为60cm。
②在2000.0历元,现代ITRF框架与ITRF97间差别约5cm(在2020.0历元可达15 cm)。在精度要求不高或者坐标精度低的情况下,甚至可以不做框架转换。
注意:1954北京大地坐标系(以下简称“北京54”)和西安80这些参心坐标,是相对大地原点的坐标,没有对准ITRF参考框架,也没有考虑坐标的时变。因此,不牵扯历元、框架这些概念。
三、参心转换和地心转换我国常用坐标转换为CGCS2000可分为两种类型:
(1)参心坐标转换
即参心坐标系和CGCS2000间的坐标转换。
西安80或北京54坐标系是静态的,CGCS2000是一组同框架同历元坐标,也是静态的。两组静态坐标转换采用静态转换模式。
同样,西安80或北京54坐标和一组同框架同历元的ITRS或WGS-84坐标之间,也可以采用静态转换的模式来转换。
(2)地心坐标转换
即ITRS或WGS-84等地心坐标转换为CGCS2000。
1)已知坐标的历元、框架采用动态转换模式。
将不同历元、不同ITRF框架的动态坐标(ITRS或WGS-84)转换为CGCS2000(2000.0历元、ITRF97框架),采用动态转换模式。
如果坐标精度低,可不做框架转换,只做历元归算。
框架转换参数和速度场模型可以在测绘行业标准CH/T 2014—2016 《大地测量控制点坐标转换技术规范》(以下简称“CH/T 2014”)中查到,不需要自己求。
特点:只要明确坐标的历元和框架,单点就可以转换。
2)已知坐标的历元、框架也可以采用静态转换模式。
例如:一组2019.5历元、ITRF2014框架下的坐标(ITRS或WGS-84),同CGCS2000坐标一样,是一组同框架同历元坐标。可以和CGCS2000坐标做静态转换。
实质上是一个静态转换把历元归算和框架转换这两步都吸收了。
之前没有发布速度场模型的时候,用户无法做历元归算,只能采用静态转换模式转换。
注意:静态转换和动态转换中的框架转换都是平移、旋转和尺度变换。区别在于:
①静态转换,用重合点求出的区域性转换参数,转换结果不唯一,不可靠。
②框架转换,用四种空间测量技术实现的全球性转换参数,转换结果唯一,更可靠。
静态转换的好处是,解出的区域性转换参数更有代表性。但是需要找多个重合点,自行解算转换参数。而且由于大范围板块形变不一致,静态转换更适用于小范围转换。
动态转换只要明确坐标的历元和框架,单点就可以转换。不需要和其他点一致,体现了动态特点。但是速度场模型误差的影响会随时间放大,也不能顾及高程变化以及坐标的非线性变化。更适用于历元间隔较短的情况。
3)未知地心坐标的历元、框架,只能采用静态转换模式转换。
长期以来,大家习惯于把GPS测得的坐标都叫做WGS-84坐标,但是没有标明坐标的历元和框架,无法做动态转换。
对于这种未知坐标历元的WGS-84坐标只能采用静态转换模式转换为CGCS2000 。(需要重合点)
虽然不知道这组WGS-84坐标的历元,也应该保证其历元大致相同,或是同一期观测的WGS-84坐标。不同时期的WGS-84坐标不自洽,不能作为重合点使用。
可根据坐标每年约3~4cm的变化量和精度需求来估计历元的一致性要求。
作者:千寻研究院刘光明
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






