3d动画演示无刷直流电机工作原理(直流无刷电机领先设计)
【嘉勤点评】中颖电子发明的无位置传感器的直流无刷电动机的驱动方案,基于现有的双极性PWM波算法,发明了无位置传感器的直流无刷电机受迫倒转驱动的解决方案,不仅能够降低生产成本,而且可以降低系统的故障率。
集微网消息,如今,直流无刷电动机(BLDCM)的无传感器技术已经相当成熟,捕捉反电动势过零点的算法很好的解决了中高速的驱动问题,在低速及零速的情形下,依据凸极效应的双极性PWM波算法也能很好的适应于有一定凸极率的电机。
这种算法与有位置传感器的驱动方案相比,目前无位置传感器技术存在的最后盲区就是受迫倒转(即电机向前的驱动力小于外部施加的迫使电机倒转的力,导致电机不断倒转)的情形,如果能解决电机在运转过程中受迫倒转的驱动问题,无位置传感器技术将真正有可能完全替代有位置传感器的方案。
基于这样的想法和目的,中颖电子在2021年1月29日申请了一项名为“一种无位置传感器的直流无刷电动机的驱动方法”的发明专利(申请号:202110128300.8),申请人为中颖电子股份有限公司。
根据该专利目前公开的相关资料,让我们一起来看看这项技术方案吧。

如上图,为该专利中展示的双极性PWM波的正通脉冲加在AB两相定子绕组时的电机驱动电路示意图,其中,A相上桥导通(AH导通),B相下桥导通(BL导通),电流按图中加粗线方向流动。
在经历了一个较长的脉冲(即正通脉冲)之后,控制端突然改变,令A相上桥断开,下桥导通(AL导通),B相下桥断开,上桥导通(BH导通),即通以反相脉冲。由于电机绕组具有较大电感,其电流不会突变,同时,正通脉冲比反通脉冲宽,可以确保电机上的电流不会反流,相应的电机定子上的磁场方向就不会发生变化,从而起到节省电能的目的。
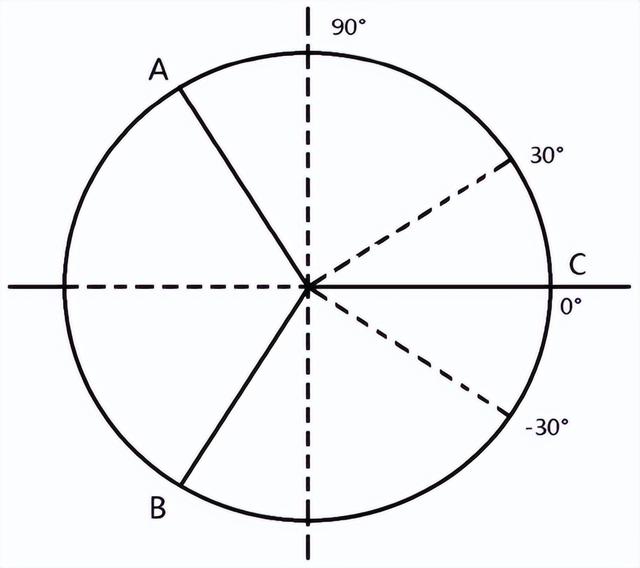
如上图,为通电的两相定子与转子位置信息的示意图,假设定子磁场方向与电流方向同相,当A向B(即驱动方向)正向通电时,则此时定子磁场在-90°位置;若假设电机为顺时针转动,依据直流无刷电机的六步驱动法原理可知,转子正从30°位置向-30°位置旋转。在此情形下,A到B为正向通电,此时C相端电压为Vc ;B到A为反向通电,此时C相端电压为Vc-。
转子在30°位置时,转子q轴(交轴)正对A相,由于凸极效应有Lq>Ld(d轴为电机的直轴),所以LA>LB,Lq和Ld即为q轴和d轴上的定子电感。此时,Vc <Vc-,当转子逐渐旋转来到0°位置时,A、B两相定子离转子的d轴及q轴距离均相等,故此有LA=LB,Vc =Vc-,在该专利中,将此处定义为“等电感位置”。
当转子转过等电感位置时,Vc 和Vc-的大小关系就会发生逆转,Vc 和Vc-的差值大于某个阈值时,就可以认为转子已经来到-30°位置附近,便进行换相操作。

如上图,为该专利中发明的无位置传感器的直流无刷电动机的驱动方法示意图,该方案中采用直流无刷电动机的六步驱动法驱动转子旋转,六步驱动法表示包括具有顺序关系的六个代表不同驱动方式的步骤。
在该驱动方法进行时,采用双极性PWM波对三个定子绕组中的两个通电,捕捉驱动电压和检测电压相等的时刻。当捕捉到驱动电压和检测电压相等时,继续进行六步驱动法中的步骤,依旧采用双极性PWM波通电。
当等待一段时间直到续流电流消失后,就对驱动电压和检测电压进行采样,通过比较驱动电压和检测电压的大小关系,根据比较结果确定转子的当前位置,并据此判断电机的旋转方向。如果电动机正在正转,则继续原有的驱动方式,按照常规的双极性PWM波算法,等待转子再旋转30°后向前换相;如果如果电动机正在倒转,则立刻切换至上一种驱动方式。
以上就是中颖电子发明的无位置传感器的直流无刷电动机的驱动方案,为了解决常规双极性PWM波算法无法判断电机的转向的缺陷,该方案基于现有的双极性PWM波算法,发明了无位置传感器的直流无刷电机受迫倒转驱动的解决方案。这种无感方案不仅能够降低生产成本,而且可以降低系统的故障率。
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






