毫米波雷达最新研究(量产技术与成本比拼)
虽然4D成像雷达已经正式进入了量产上车周期,但真正的“技术攻坚战”才刚刚开始。
伴随着智能网联汽车渗透率的快速攀升,毫米波雷达的前装搭载率正在快速上升。高工智能汽车研究院监测数据显示,今年1-6月中国市场(不含进出口)乘用车新车前装标配搭载前向毫米波雷达361.12万颗,同比增长12.55%;标配搭载角雷达(含后向)384.15万颗,同比增长37.89%。
相比传统3D毫米波雷达,4D点云/成像雷达增加了目标高度维度数据的探测和解析,实现了距离、速度、方位及高度四个维度的信息感知,并且具备高角分辨率等优势,未来替代传统毫米波雷达升级的空间巨大。
高工智能汽车研究院预计,到2023年,4D成像雷达的搭载量有望突破百万颗;到2025年,4D成像雷达占全部前向毫米波雷达的比重有望超过40%。
川速微波CEO王东峰博士在2022年度(第四届)高工智能汽车市场峰会发表精彩演讲表示,伴随着角分辨率的越来越高,4D成像雷达已经成为高阶智能驾驶系统必不可少的传感器,极大可能成为传感器市场的下一个爆点。

川速微波CEO王东峰博士
不过,尽管4D毫米波雷达的未来可期,但要想成为一个标准化、可规模化量产的产品,所面临的技术挑战和难题依然很多。
技术与量产难题众所周知,作为ADAS系统的核心传感器之一,毫米波雷达具备全天候、全天时的探测能力,但面临L3及更高级别的自动驾驶,传统3D毫米波雷达的短板已经逐步呈现。
王东峰介绍,L3以上级别自动驾驶系统对于雷达的要求,不仅需要具备高定位精度(厘米级)、高角分辨率(优于1°)、精准的目标分类和识别能力,还需要输出高质量点云图像和对所有的静态和动态目标作出高精度准确的测量,并且实时解析目标轮廊和行为等能力。
4D成像雷达与传统毫米波雷达相比,具备两个主要特征:第一点在于4D,传统毫米波雷达主要用来探测物体的距离、相对速度和方位角,但4D雷达增加了目标高度的测量,事实上毫米波雷达可输出的信息不止这4个维度,还有更多;第二点则在于成像,指的是角度分辨率很高,可以对典型道路上的目标如行人、非机动车、机动车等形成众多探测点,并勾勒出目标轮廊,即点云成像。
王东峰表示,从传统的毫米波雷达升级到4D成像雷达,增加了探测维度,并显著提升了水平和俯仰的角分辨率,需要增加天线数量、提升主处理器性能和提高算法目标处理能力等。
同时,4D成像雷达系统复杂度大幅提升,原始数据需要作匹配滤波、波达角计算,输出的点云需要去噪、多帧融合等预处理,整个信号处理计算量大大增加。但是,当前雷达传感器却面临算力不足、存储等资源不足等问题,无法提取原始数据组中的全部信息,若4D点云雷达后处理再引入AI算法,更是无法应对。
业内人士一致认为,与激光雷达相比,以更合理的价格实现高性能智能驾驶方案的落地,是4D成像雷达的切入点。然而,当下4D成像雷达“降本上量”的问题却始终未能得到解决。
此外,4D成像雷达还面临着产品本身的一致性、可靠性等问题,尤其是在大阵列、多通道的情况下,如何保证相位校准也是一大难题。
如何破除?“一味靠增加收发天线的方式来提升4D成像雷达的性能已经行不通。车上雷达的安装空间是有限的,当天线总口径也就是雷达尺寸增大到一定程度后就很难再增大了,而天线口径决定的雷达物理角分辨率也就到了瓶颈。”王东峰表示,4D成像雷达的角分辨率等性能提升,还需要依赖处理器、软件算法及数据处理等方式。
川速微波已经推出了近程、中程、远程4D成像雷达,不同类型的4D成像雷达采用了不同的设计方案,并且解决了雷达技术和量产中遇上的各种难题。
川速微波的中程4D成像雷达采用了12T8R天线布局,测距范围超过200米,主要面向的是角雷达应用。王东峰表示,毫米波雷达作为角雷达使用,体积要做到比较小,川速微波对雷达体积和角分辨率进行了深入优化,不仅能够达到较好的角分辨率水平,也能满足角雷达的安装要求。
川速微波的远程4D成像雷达采用的是12T16R天线、虚拟192通道,探测距离超过350米,可以输出高质量的4D点云(有效点云数量达到4096),并且具备高分辨率、高定位精度等优势,主要面向的是L3级以上自动驾驶、AEB\ACC\TJA等应用市场。王东峰表示,该雷达在水平和俯仰双方向采用了MIMO稀疏阵列布局,并匹配超分辨率算法,从而实现了低于1°的角分辨率;而面对雷达之间的相互干扰问题,采用DFM信号编码技术来抗同频干扰。
对于4D成像雷达的信号处理,川速微波则是将输出的点云分成两个分支,一个分支采用传统雷达型号处理方式来进行目标的识别、跟踪、地图重建等任务;另一个分支则与AI结合起来,用深度学习和机器学习算法来实现多维信号处理,最终对接用户应用层算法模块。该方法有效地解决了由于收发天线变多、MIMO稀疏阵列增大,导致雷达信号处理量大的难题。
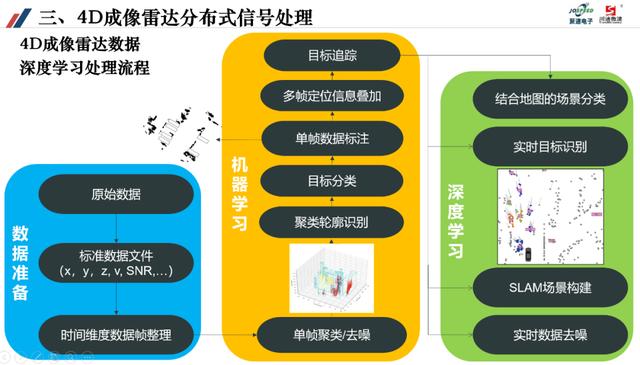
“4D之外,毫米波雷达还有RCS、信噪比、反射点等等更多维度的信息,如果用传统的视频图像处理方式去做点云图像的后处理会丢失大量的信息,但如果用深度学习的方法来处理,每个维度的信息都是有用的。”王东峰补充表示。
近程点云成像雷达,川速微波则首创了行泊一体AVP角雷达,主要采用的是单芯片的解决方案,水平角探测范围±75°,俯仰角探测范围±15°,拥有行车中普通角雷达模式和泊车中4D点云AVP模式。在低速模式下,行泊一体AVP角雷达是一款近场4D点云成像雷达,可以用于L4级的自主搜寻车位和泊车功能,而在行车的过程中又可以起到传统角雷达的作用,实现目前主流的BSD、自动变道等应用。目前,该行泊一体AVP角雷达已经量产。

当前,包括宝马iX、上汽非凡R7、路特斯等越来越多车型前装搭载了4D成像雷达,尤其是特斯拉披露了申请成像雷达的FCC认证信息后,市场对于4D成像雷达的关注度急剧上升。现阶段,4D成像雷达除了解决性能问题之外,最重要的还是要解决能否大规模上车的问题。
一方面,4D成像雷达的创新与大规模量产,对于芯片的计算能力、可靠性、海量数据处理能力提出了更高的要求。王东峰表示,“雷达传感器算力已经严重不足,单纯依靠雷达芯片,根本无法提取原始数据组的全部信息。”
另一方面则是成本控制难题。在一般的4D雷达成像方案中,主要是依靠增加芯片、天线等硬件来实现。由于收发天线通道增多,理论上所采用的芯片数量也会更大,成本也会更高。川速微波在4D成像雷达上采用集成度更高的MMIC SOC,对于同性能要求下的成本控制有很大的好处。
王东峰介绍,4D成像雷达的信号处理技术和域控制器的硬件进行深度融合,将成为毫米波雷达车载应用的趋势,也将是降低系统成本的重要方式。川速微波将毫米波雷达的信号处理模块进行了再分配,将各级的输出数据和算法在域控当中进行分配,利用域控芯片的超强算力,实现雷达点云成像功能,即将雷达点云数据处理和应用层处理植入域控芯片。这在一定程度上解决了雷达传感器算力不足的问题,并且可以更好地降低多传感器融合的系统成本。
“雷达算力集中做基础信号处理算法甚至只收集原始数据,而雷达信号及信息处理、AI算法在域控制器上运行,这不仅可以减少算力限制,还可以提升处理效果。”王东峰表示,多传感器信息处理在域控制器上运行,可以多数据层级、多维度地进行数据融合,大幅提升了融合深度。

尽管4D毫米波雷达已经开始了小规模的量产,但真正的挑战却才刚刚开始,谁能够率先突破大规模量产的技术与成本难题,对于未来的市场站位极其重要。
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






