乒乓球的六种基本步法(乒乓球最大的魅力在于旋转)
人类的认知只能局限在由长、宽、高确立的三维空间,处于第四维空间的物体人类是无法感知的。因此,上下左右前后六个方向是横平竖直、最简单明白的自然方向分类。
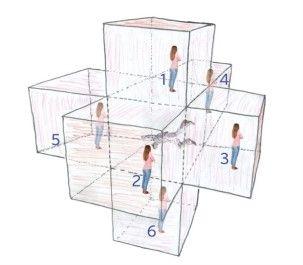
图一 横平竖直的六个方向
图一中,上下左右前后的六个自然方向由数字1、6、5、3、4、2依次标出。其它所有的方向都可以看成由这六个方向组合而成,比如左上方、右后方、前上方、左后下方等等。
乒乓球旋转分类与此类似,有六种基本旋转球——上下左右顺逆,其它所有种类旋转都可由这六种基本旋转组合而成。

一 直角坐标系中的 3根轴 3个平面 1个立方体
要正确认识乒乓球的26种旋转球,应该先要记住图一所示的3根轴、3个平面、1个立方体。所有这些轴、面、体几何要素的中心都是放在乒乓球的中心,即球心。所有观察乒乓球的视角都是从击球者的视角出发。
请看图二,左图3根两两互相垂直的坐标轴x(红色)、y(蓝色)、z(绿色)正负端分别指向上下左右前后六个方向。中图3个两两互相垂直的坐标平面分别是水平面xz(蓝色)、横立面xy(红色)、纵立面yz(灰色)。右图展示的是1个包裹着乒乓球的浅蓝色立方体。
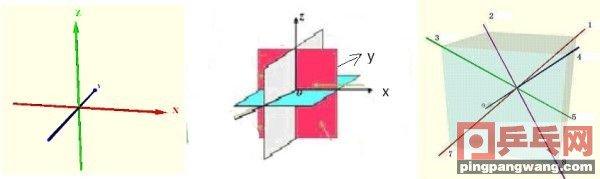
图二 3轴3面1体示意图
二 13 根旋转轴
我们知道,任何旋转物体都是围绕着一根旋转轴运动的。像车轮、电扇、螺旋桨都有一根中心轴。而乒乓球的旋转属于非定轴旋转,有无数根旋转轴。我们还知道围绕着每根旋转轴都有正反两个方向的旋转,所以乒乓球的 26 种(类)旋转必然对应着13根旋转轴。

下面,我们从直角坐标系中来找找这13根旋转轴。(参见图二)
首先,三根坐标轴本身就是 3 根旋转轴(左图)。三个坐标平面各有两根对角线(中图),一共 6 根面对角线也是旋转轴。蓝色立方体的体对角线(右图)就是 4 根旋转轴(记住图中体对角线1234的位置)。
三 乒乓球的旋转方向
我们一般将乒乓球抽象为薄壳刚体的旋转。表示刚体在三维空间的旋转有多种互相等价的数学方法,常见的有欧拉角、旋转矩阵(DCM-方向余弦阵)、旋转向量、四元数等。
乒乓球旋转(自转)的轴分类法可看成是旋转向量(Rotation Vector)法在乒乓球运动具体条件下的变式应用。

直观来讲,一个四维向量(φ,x,y,z)就可以表示出三维空间的任意旋转。其中φ是一个旋转角度,可用角速度的大小来表征旋转强度,因其与旋转属性分类无关,暂不考虑。所以一个空间三维向量(x,y,z)就足以表示一个乒乓球的旋转方向,即可指示其旋转属性。
右手螺旋法则具体地说,右手四指并拢弯曲与大拇指垂直,拇指指向三维向量M(x,y,z)方向即旋转轴的方向,则四指弯曲的方向就是乒乓球旋转的方向。
图三 旋转向量方向与乒乓球旋转方向的关系
一根直线两端指向两个相反的方向,即一根旋转轴可代表两个方向相反的旋转向量,也就是我们常说的一根旋转轴对应两种方向相反的旋转球(拇指指向相反,当然旋转方向也相反)。
下面我们全面看一看这 26 种 旋转球在三维空间是怎么旋转的。

图四 26种(类)旋转一览图
根据图四中的红色箭头,使用右手螺旋法则很容易判断乒乓球26种旋转球在三维空间的旋转方向。图中红色箭头就是旋转向量的方向(也就是旋转轴的方向),下部八类三维复合旋转图中的红色数字就是图二中立方体4根体对角线的编号。
乒乓网 十年砍柴
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com