直升机操纵装置结构图(直升机机载电子设备CDV155飞行指挥计算机工作原理-OO)
直升机机载电子设备CDV155飞行指挥计算机工作原理-OO
直升机机载电子设备CDV155飞行指挥计算机虚拟化仪表试验器设计-42
编写:贺军
1、概述:
“直升机机载电子设备CDV155飞行指挥计算机”是“SFIM”公司的产品,
本文件所涵盖的CDV155计算机必须与UCC155控制单元(在另一本手册中描述)一起使用,以形成CDV155系列的4轴数字飞行耦合器。当与155P型的SFIM自动驾驶仪和BEPA一起使用时,它们被专门设计用来管理AS332型直升机的各种飞行和导航模式。
目前所有的版本,即CDV15503、CDV15505、CDV15507、CDV15508和CDV15509,不仅使飞行员能保持各种驾驶模式,而且还能保持更高的模式,如巡航、导航、ILS/VOR、SAR、声纳、武器装备等等……)。
此外,CDV15505、CDV15507和CDV15509计算机还提供了自动或手动选择无线电高度计滤波的可能性周期是为了考虑到波的类型。
CDV15505、CDV15508和CDV15509计算机可以从4台计算机中选择1台驾驶链的可能收益,以优化法律根据所保持的模式(巡航、悬停、声纳、武器等)。
CDV15505计算机用于保持声纳模式,CDV15507、CDV15508和CDV15509计算机在修改其软件后也可以用于这些模式(如CDV15508-03的情况)。此外,CDV15508-04支持两种声纳类型:“HS12”或“FLASH”(声纳类型由“SONARF”的计算机输入决定)。CDV15508-05与CDV15508-04相同,除了软件改进,防止在声纳穹顶被淹没时出现不必要的命令后退。
CDV15508计算机特别适用于直升机配备了武装支援武器系统。CDV15505和CDV15509计算机可以使用该功能确保此能够使用,但被他们所配置的软件阻止这样做。
CDV15509计算机适用于使用ADI类型77的安装。
“直升机机载电子设备CDV155飞行指挥计算机虚拟化仪表试验器”是用于检测试验“CDV155飞行指挥耦合计算机”各项技术指标的设备,检测程序编程按照直升机维护手册“22-59-96-2”编写检测程序。
本“直升机机载电子设备CDV155飞行指挥计算机虚拟化仪表试验器”设计适用于检测型号为:
SFM公司产品:飞行指挥耦合CDV155计算机。
适应检测型号:CDV155(--)-(--)
适应检测SFM公司产品零件编号:
CDV15503-02
CDV15503-03
CDV15503-04
CDV15503-05
CDV15505-03
CDV15505-04
CDV15507-03
CDV15507-04
CDV15508-01
CDV15508-02
CDV15508-03
CDV15508-04
CDV15508-05
CDV15509-01
CDV15509-02
“直升机机载电子设备CDV155飞行指挥计算机虚拟化仪表试验器”系统连接如图所示:

直升机机载电子设备CDV155飞行指挥计算机虚拟化仪表试验器设计-42
直升机机载电子设备CDV155飞行指挥计算机工作原理-OO
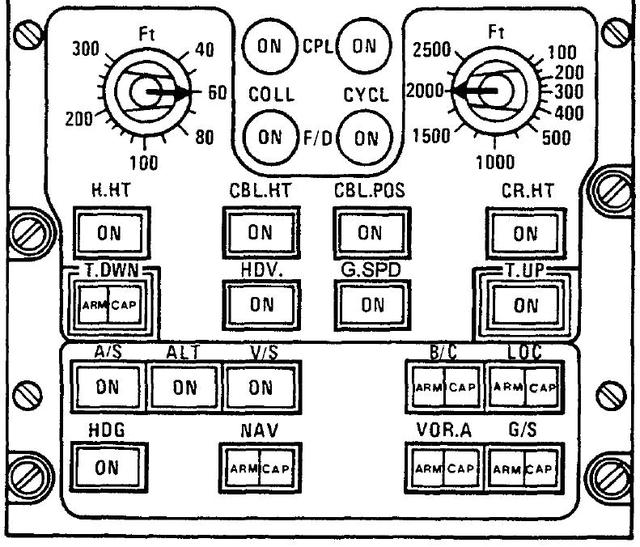
描述和操作
4、操作:
4.C.(3)(c)3、导航选择器设置为ILS1:
- 在“V0R.A”模式或“NAV”导航子模式“VOR”,“ILS”接收机No.1用于控制,没有监控。如果离散有效信号“VALVL1”消失,CDV155将放弃“VOR”偏差信号“VLDEV1”。

- 在“LOC”和“B/C”信息控制模式中,“ILS”接收器No.1用于控制,“ILS”接收器No.2用于监控。如果缺少离散有效信号“VALVL 1”,CDV155将放弃“LOC”偏差信号。当离散有效信号“VALVL1”和“VALVL2”可用时(在“1”),CDV155将“VLDEV1”和“VLDEV2”两个“ILS”接收器的输出进行比较。如果它们之间的差超过0.4°,CDV155表示偏差信号。

- 在“G/S”模式下,该操作与在逻辑控制器模式中的操作相同。如果离散有效性信号“VALGS1”缺失,或者偏差信号“GSDEV1”和“GSDEV2”之间的差值超过0.4°,则CDV155也会放弃滑移偏差信号。

4.C.4、导航选择器设置为ILS2:
- 在“V0R.A”模式或“NAV”导航子模式“VOR”,“ILS”接收机No.2用于控制,没有监控。如果离散有效性信号“VALVL2”消失,CDV155放弃“VOR”偏差信号“VLDEV2”。
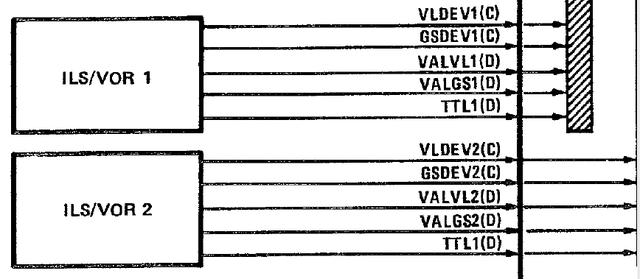
- 在“LOC”和“B/C”信息控制模式中,“ILS”接收机No.2用于控制,“ILS”接收机No.1用于监控。如果缺少离散有效信号“VALVL2”,CDV155将放弃偏差信号“VLDEV2”。当离散有效性信号“VALVL2”和“VALVL1”可用时(在“1”),CDV155将两个ILS接收器和“VLDEV2”和“VLDEV1”的输出进行比较。如果它们之间的差值超过0.4°,则CDV155将放弃该“LOC”偏差信号。
- 在“G/S”模式下,操作与逻辑“LOC”模式下的操作相同。如果离散有效性信号“VALGS2”缺失,或者偏差信号“GSDEV 2”和“GSDEV1”之间的差超过0.4°,则CDV155放弃滑移偏差信号“VALGS2”和“VALGS1”。即使有离散信号。

4.C.(3)(d)、重新配置由无线电高度计传输的信号:
如果一个无线电高度计输出的信号无效(见第一段。4.C.(2)(e)),CDV155使用来自另一个无线电高度计。
当两个无线电高度计输出的信号都有效时,CDV155会对它们进行比较。如果其中一个无线电高度计指示的高度小于300英尺,并且与其他无线电高度计指示的高度相差超过50英尺,CDV155将拒绝高度信号。同样地,如果两个无线电高度计显示的高度都超过300英尺,但相差超过150英尺,CDV155将拒绝这些信号。
当无线电高度计信号有效时,CDV155使用从无线电高度计2输出的信息。
无论什么情况下,如果无线电高度计高于2640 ft,(CDV15503-XX)
或2700ft(CDV15505-XX、CDV15507-XX、CDV15508-XX和CDV15509-XX),CDV155将使此信息失效。
在CDV15505-XX的情况下。CDV15508-XX和CDV15509-XX,特定于“G/S”模式的无线电高度计有效性,计算方式允许其接触超过2700英尺。
注意:此处理方法适用于全双工架构或开关无线电高度计架构。
4.C.(4)、过滤由传感器传输的信号:
4.C.(4)(a)、加速度计补偿:
加速度计值的补偿目的是通过从原始加速度计信号和纵向和横向姿态信号计算所有三个轴(纵向、横向和垂直)上的真实直升机加速度。
首先对所使用的纵向姿态进行处理,以消除陀螺进动的影响。
应用补偿后,利用加速度结果对模式进行伺服控制。
CDV155仅在加速度计测量有效时:
CDV155计算补偿的加速度值(参见第4段。C.(2)(c)),
姿态信号有效(见第4段。C.(2)(b))。
4.C.(4)(b)、空速信号的滤波:
CDV155计算过滤后的空速如下:
- 如果空速信号有效(见第3段。4.C.(2)(d))和补偿的加速度值有效,根据空速数据和补偿的纵向加速度进一步对空速信号进行滤波,计算滤波后的空速。
- 如果补偿的加速度值无效,则通过过滤原始空速数据获得过滤后的空速。空速模式的性能随后被降级。
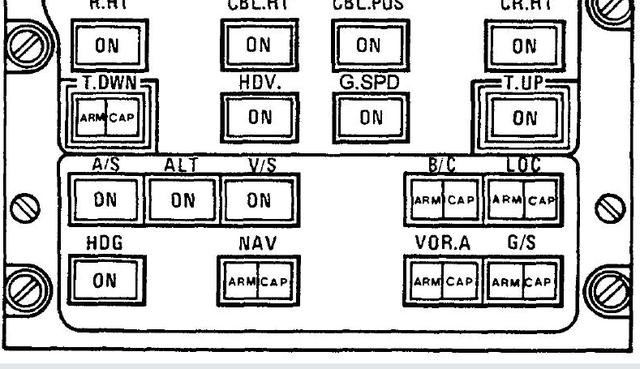
- 如果空速数据无效,则不计算过滤后的空速。在这种情况下,不可能使用“A/S”,“G/A”,“T.UP”和“T.DWN”模式。

(c)、压力高度信号的过滤:
CDV155计算过滤的压力高度和过滤的压力垂直速度,如下所述:
当压力高度数据有效时(见4,C.(2)(d))和补偿后的加速度值有效,压力高度和过滤后的压力垂直速度由一组额外的过滤器根据压力高度数据和补偿后的垂直加速度计算。
如果补偿后的加速度无效,则通过对原始压力高度数据进行过滤,得到压力高度和过滤后的压力垂直速度。然后降低了使用空气数据参数的模式的性能。
如果压力高度数据无效,则不计算压力高度和压力垂直速度,在这种情况下,不可能启用模式“ALT”,“V/S”和“G/S”。
4.C.(4)(d)、滤波多普勒速度信号:
CDV155基于原始多普勒信号和补偿的纵向1和横向加速度值,通过卡尔曼滤波器计算滤波后的纵向和横向多普勒速度。
使用的卡尔曼滤波器可以在三种模式之一工作:
- 标称模式:多普勒有效,不对内存,不跟踪和补偿加速度有效:滤波器通过考虑补偿加速度来减弱膨胀对多普勒测量值的影响。
- 由于补偿加速度值的不有效性而降级操作:滤波器现在的效率要低得多,也不再过滤掉膨胀效应。因此,该模式被限制为10秒。如果补偿加速度值无效超过10秒,则不再计算过滤后的多普勒速度,“HOV”,“G.SPD”和“T. DWN”多普勒模式不能不再使用。

- 由于失去多普勒速度而降级操作(多普勒无效,内存或跟踪):滤波器继续通过积分补偿加速度值来估计速度。从长远来看,过滤后的速度和实际的直升机速度之间可能会出现差异。因此,操作模式被限制为60秒。当多普勒速度无效60秒时,滤波后的速度就不再被计算出来,多普勒模式也就不再被参与进来。
当多普勒和补偿的加速度值都无效时,不再计算滤波速度,多普勒模式不能参与。
4.C.(4)(e)、无线电高度计高度信号的过滤:
无线电高度高度信号用于“G/S”模式“H.HT”,“CR.HT”,“T.DWN”和“T.UP”模式(在海上)。它还用于确认“SONAR”声纳干式电缆高度信息(计算机CDV15505-XX、CDV15508-03、CDV15508-04和CDV15508-05)。

为了获得在粗糙海面上“SAR”模式所需的性能,CDV155通过卡尔曼滤波器过滤无线电高度,该滤波器优化后过滤掉膨胀。然而,对于“G/S模式或在“SAR”模式下操纵时,CDV15505-XX、CDV15508-XX和CDV15509-XX通过一组额外的线性滤波器计算第二个滤波高度。
当直升机速度较高时,该线性滤波器系统也用于“SAR”模式:
- 当多普勒速度低于10 kt或无效时,当空气速度低于35 kt时,使用卡尔曼滤波器输出的高度值。
- 当多普勒速度高于20 kt时,使用线性滤波器输出的高度,如果无效,则使用空气速度高于45 kt时。
-在上述定义的限制之间,所使用的高度是由卡尔曼和线性滤波器输出的高度的线性组合。
-如果多普勒和空气速度不可用,则使用的高度是由卡尔曼滤波器输出的高度。
此外,卡尔曼滤波器加倍:两个滤波器中的一个优化滤波平均波(7s周期),另一个滤波长波(12.5s周期)。一组内部过滤器允许自动选择其中一个或另一个过滤器。然而,CDV155获得了2个离散信号“MERAG”和“AUTCOM”。第一个是手动将过滤器设置为12.5s的周期切换,在未获得的地方。后者支持自动情况,“MERAG”离散信号为正在使用。
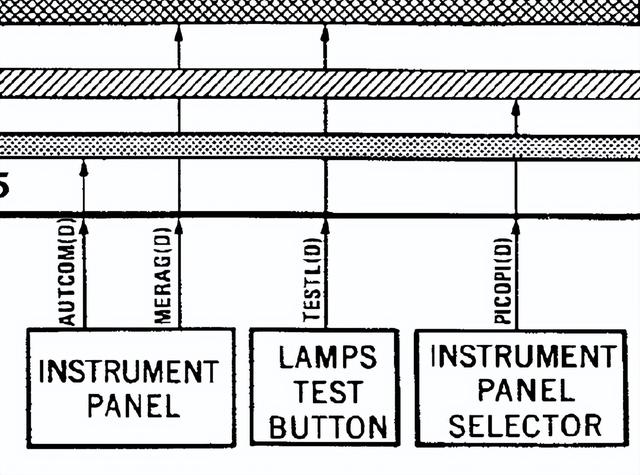
由“LONHOU” 离散信号表示哪个传输的过滤器。
两种高度类型和垂直滤波(卡尔曼和速度滤波线性)的计算测量了辐射高度计的高度和补偿的垂直加速度,并在故障时具有等效的行为。
- 当无线电高度和补偿加速度有效时,滤波为标称。
- 如果无线电高度计的高度无效,CDV155将继续估计高度和垂直速度5秒。在此之后,不再计算过滤后的高度,以及“G/S”,“H.HT”,“CR.HT”,“T.UP”和“T.DWN”模式不能再使用。
- 如果补偿的加速度无效,CDV155将继续估计高度和垂直速度10秒。在此之后,如果无效仍然存在,则为“G/S”,“H.HT”,“CR.HT”,“T.UP”和“T.DWN”模式不能再使用。
- 如果无线电高度计高度和补偿加速度无效,则不计算过滤后的变量,不能使用使用无线电高度计的模式。
- 如果对“G/S”的无线电高度计高度进行过滤,如果未处理的无线电高度计高度超过2500英尺,则过滤高度应强制达到2500英尺(CDV15507-XX)。
此外,对于CDV15509-XX,如果直升机在高速通过高浮雕上方,无线电高度计信号会受到严重干扰,卡尔曼和线性滤波器的响应会不同。超过一定限制(高度差高于20英尺或垂直速度差高于500英尺/分钟),如果没有无线电高度计模式激活(“H.HT”,“CR.HT”,“T.UP”,“T.DWN”或“G/S”)或武装(“G/S”俯仰或横滚,或“T.DWN”),所有无线电高度计滤波器均重新初始化。
这个初始化阶段,没有无线电高度计模式,持续6秒。
在此阶段,过滤后的无线电高度计高度被宣布无效。
4.C.(4)(f)、干式电缆高度的过滤(CDV15505-XX、CDV15508-03、CDV15508-04、CDV15508-05):
在“C.HT”模式中,CDV155使用互补线性滤波器系统和补偿的垂直加速度,计算高度和垂直速度过滤。

干电缆的修正高度是通过条件无线电高度计高度确认干电缆的测量高度得到的。此确认可以帮助消除干式电缆高度信号的偏差。
如果出现故障,过滤可以按以下方式运行:
- 如果电缆有效,声纳穹顶被淹没,补偿加速度有效(见第一段。4.C.(4)(a)),过滤是标称的。
- 如果电缆无效或穹顶从水中出现,CDV155估计高度和过滤垂直信号需要5秒。在此期间,干电缆偏置被冻结或重置。一旦经过5s周期,就无法计算这些值,且“C.HT”模式也无法再启动。

- 如果补偿的加速度无效,CDV155将继续估计过滤后的高度和过滤后的垂直速度10秒。经过此时间后,无法再计算值,“C.HT”模式无法再启动。
-在补偿加速度失效、电缆或圆顶浸没失效时,不再计算过滤变量,模式不再使用。
-当穹顶被淹没且电缆和无线电高度计信息有效时,应计算对干燥电缆高度的偏差。在无线电高度计无效时,在恒定的偏置下确认干式电缆高度,而不限制时间(然后设置电缆轻微退化指示器)。
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com