悬架弹簧匹配设计(悬架螺旋弹簧自动化设计和优化)
作者:S.Schneider,Mubea Fahrwerksfedern GmbH
翻译:上海安世亚太

前言
Mubea集团是世界领先的汽车零部件制造商,其致力于汽车轻量化研究,以通过减少二氧化碳排放来改善环境。悬架部件在公司的投资组合和收入中占很大比例,底盘部件中也包括螺旋弹簧。
Mubea集团将有限元分析方法和Ansys optiSLang应用于螺旋弹簧自动化设计以及后续优化过程中,以满足所有边界条件和使用期限要求。
01 悬架螺旋弹簧的任务
当前的车流密度要求汽车具有安全舒适的驾驶环境,以保证不论在短距离还是长距离行驶时驾驶员都能全神贯注。因此,除了直观设计、可管理性、性价比和无故障操作,机动车的高舒适度和高安全性也至关重要。
如要满足这些要求,就需要在底盘和车身之间安装弹性部件和阻尼减震部件。一方面,这些部件必须能在很大程度上吸收道路引起的冲击和振动,另一方面,它们必须始终确保车轮有足够的牵引力控制。
螺旋压缩弹簧作为弹性部件是不二之选,因为其:
- 为紧凑型设计,可以安装在副车架或摆臂上以节省空间
- 可以与阻尼器合为一个部件(简单悬架和麦弗逊悬架)
- 具有线性特征甚至渐进性特征
- 经济实惠,成本低
- 操作简单,免维护
除了螺旋压缩弹簧外,现代汽车上一般都安装了稳定装置,以协助车轮单侧偏转和双侧偏转。稳定器主要用于减少车身在转弯时的摇摆,而螺旋压缩弹簧主要用于确保车身的正确俯仰响应和离地间隙。

图1:阻尼器周围弹簧布置情况
02 荷载传递的类型
从安装和荷载传递角度来看,弹簧端部螺旋的设计至关重要。螺旋弹簧通常安装在其支柱的内部或外部,角度范围高达270°,以支持中心荷载传递。支座可以建在平面上,也可以建在活动式弹簧座上,通常由适合端圈的金属片或橡胶零件制成。
荷载的传递基本上可以分为两种不同的类型。 较简单的技术是使用平行对齐的支柱,且在没有任何横向偏移的情况下,线性引导弹簧端部螺旋。 如今这种方法仍十分有用,因为它可对圆柱形螺旋压缩弹簧进行简单的尺寸分析。
第一种载荷传递类型的两个示例如图1所示。 弹簧布置在阻尼器周围以合成一个部件。端端相连,无横向偏移。这样,圆柱形弹簧几乎可以自由偏转,在弯矩和横向力共同作用下螺旋处应力可以均匀分布。
然而,在许多实际应用中,端部线圈通过具有空间曲面或横向偏移的非平行对齐支柱相互引导。 在分析螺旋压缩弹簧的尺寸时,必须用有限元分析(FEA)代替简单方法。 第二种力传递类型的两个示例如图2所示。

图2:悬臂上弹簧排列情况:减压(左)和压缩(右)
在下悬臂上安装弹簧然后沿着空间曲线引导弹簧端。分析结果显示,圆柱形弹簧发生不均匀变形,此外,力矩和横向力作用在弹簧两端。 结果是螺旋中的应力分布不均匀,弹簧体发生扭曲。
03 尺寸分析
基于DINEN13906-1标准表中给出的公式来计算螺旋弹簧。以下的基本公式均取自本标准表,它们描述了弹簧最重要的参数之间的关系:弹簧刚度、弹簧力、剪切模量、线径、线圈数、平均线圈直径、弹簧挠度和产生的剪应力。 这些值对于计算简单圆柱形螺旋弹簧至关重要:

然而,这种方法只适用于圆柱螺旋弹簧力传递的特殊情况。 因此,这种方法只能用于经典螺旋弹簧的初步尺寸分析。
04 参数化
在尺寸分析,特别是在几何优化中使用有限元分析时,需要螺旋弹簧的参数化模型。 随着时间的推移,Mubea的工程师们为螺旋弹簧建模开发了不同的参数化方法或应用程序。它们支持产品开发人员定义自由、自由螺旋弹簧几何形状并且设置边界条件。 此外,它们可以生成和评估有限元仿真模型。
其中有一个应用程序是专门为优化和自动设计螺旋弹簧几何形状而开发的。
1、GRASPDesigner
GRAPHDesigner基于Helix定义,它是一条以恒定螺距缠绕在圆柱体筒体上的曲线。 同样,通过这种参数化方法,螺旋弹簧建模被细分为横向曲面(主体)建模和曲线([多重]展开)建模。 对于C型或S形螺旋弹簧,则要求设计人员在使用可控参数的同时开发出可多可少复杂的弹簧体和弹簧线圈。 之所以选择NURBS的数学构造(非均匀有理样条)作为B样条曲线的扩展来描述弹簧体和线圈,是因为NURBS能够完美地映射圆弧曲线。
弹簧体由封闭NURBS曲面定义,该曲面由控制点组成。NURBS曲面上的控制点代表控制网格。 曲面的圆周方向(螺旋弹簧)由u定义,高度方向由v定义。u和v在区间[0,1]中定义。NURBS曲面的v为变量。
螺旋由NURBS曲线定义。NURBS曲线上的控制点代表控制多边形。 曲线本身由u定义在区间[0,1]。NURBS曲线的度为变量。
2、横向曲面
控制网格描述(圆柱弹簧体)横向曲面,网格包含了由圆弧曲线产生的一系列连接控制多边形。 对于圆形截面,每个控制多边形必须在如图3所示形状的圆周方向u上对齐,并且必须反映第二维度。
在设计过程或在后续的优化中,不是直接改变多边形或截面的控制点,而是改变代表各个截面的替代变量。
这些用于描述弹簧体截面的替代值包括:
- 直径
- 位移
- 倾斜角
引入这些替代值不仅有利于对螺旋弹簧体进行更直观的加工,而且还能确保大幅减少(优化)参数。

图3:横向曲面的产生与变化
3、螺旋
可变数目的控制点定义了螺旋弹簧在本体上或横向曲面的uv平面上的多级螺旋。 由此产生的控制多边形定义在横向曲面u方向的区间[0,线圈数n]和v方向的区间[0,1]上。
这里,第一个和最后一个控制点固定在(0,0)或(n,1),而其他所有点在uv平面上可以自由移动。 控制点对轴向弹簧几何形状的局部影响取决于NURBS曲率(见图4)。

图4:uv平面中螺旋的产生和变化
05 仿真模型
使用螺旋弹簧的参数化有限元模型进行数值仿真。 利用AnsysMechanicalAPDL(Ansys参数化设计语言)进行仿真。 本案例中,我们采用二次单元以及线弹性模型,进行静力、几何非线性的计算。
06 优化模型
优化的目的是在满足所有边界条件和寿命要求的同时,创建具有所需机械特性的螺旋弹簧设计。但由于存在关键需求和边界条件,这一点可能很难实现。因此,为了特别是对项目工程师的支持,在设计过程中采用了优化方法。 在参考设计的基础上,从GRASP创建OPX文件,以通过OPX接口生成optiSLang项目。
原则上,将解析生成的圆柱参考几何体用于自动化设计,以取代数值预分析。由于参数众多,需要采用EA优化算法。对现有变化类型的研究表明,对于当前的优化问题,约束自适应选项已被证明是特别稳定和有效的。
目标函数与约束条件
螺旋弹簧承受静态和动态载荷。 当达到最大挠度LJounce时达到最大静态容许载荷。 基于剪应力评估静载荷τmax =τJounce。
在不超过规定应力极限约束的前提下,主要目的是在所考虑的螺旋弹簧的螺旋区域内尽可能均匀地施加静态应力。 从而实现材料应力的均匀分布。 为此要最小化静载荷变化幅度。
如果使用不等式显示约束,分析表明其对目标历史、结果质量,或对自动化设计方法的稳定性产生负面影响。为此,将目标函数中所有的待最小化约束条件定义为惩罚项。对于一个不等式Li>=Ri,权重wi和指数ki,惩罚项Pi是

该定义包含了一个阶跃函数,一旦满足原来制定的约束不等式,就将惩罚项归零。权重和指数可用于调整惩罚项的大小,从而调整其在目标函数中的优先级。 在这里,惩罚项的加权模式更多考虑的是对约束条件的违反,而不是对原目标函数的改进。因此,可以确保优化算法主要满足所有约束条件。
对于标准化到容许区间的目标散射值C,约束条件可以定义如下:

对于作为惩罚项的替代定义,这将导致:


图5:内外设计空间限值(左)和设计限值和螺旋弹簧截面(右)
基于STLs进行设计空间验证。这里需要独立的内部和外部设计空间(见图5)。通过变形螺旋弹簧和设计空间STLs生成多个截面。每个截面基于STLs形成两个曲面。确定每个轴向弹簧截面到各自切割面的最小距离。如果轴向弹簧截面在切割面外,则最小距离为负值,这与要求符合空间距离≥0相矛盾。螺旋弹簧的前半圈和后半圈通常不进行设计空间内验证。最小距离为负值的表面,与要符合空间距离≥0的要求相矛盾。螺旋弹簧的第一半圈和最后半圈通常不在设计空间验证范围之内。
07 结果与结论
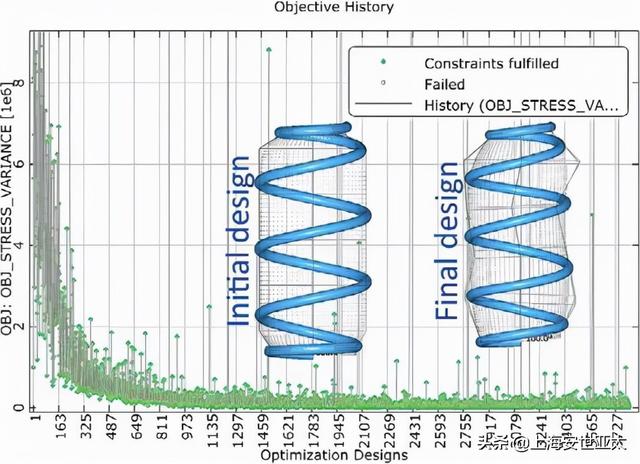
图6为采用optiSLang螺旋弹簧自动化设计的示例结果
将解析了预尺寸分析的圆柱螺旋弹簧作为初始设计。 在运行完4000种变化之后,就可以确定最终的优化设计了。 必须指出的是,目标函数一直在稳步快速改进。 这是因为在目标函数中使用了约束条件作为惩罚项,并且应用于所有先前用optiSLang分析的所有螺旋弹簧设计。 通常在尝试4000到6000个设计方案后优化设计完成。

图7:不同压缩状态下的剪应力曲线(左)和贯穿点(右)
图7为最终设计的选定结果。左侧为所考虑的线圈区域在不同压缩状态下的剪应力曲线。红色的剪应力曲线对应最大挠度,并按要求进行了充分的平滑处理。
可以在右侧按比例缩放的详细视图中看到贯穿点。 压缩步骤2所需的贯穿点位于给定公差范围内。 综上所述,使用optiSLang进行自动化设计是非常可行的。 自动化工程程序不仅以高质量结果让人信服,而且还提供了有意义的结果,这是人工设计所难以达到的。 自动尺寸分析的最大优点是应力的均匀化。 否则,在手动设计程序时,这将是一个重大挑战。
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






